Projetar uma PCB Accelerometer envolve muito mais do que apenas conectar o sensor a um microcontrolador. Em aplicações reais, o layout da placa influencia diretamente a precisão da medição, a estabilidade e a repetibilidade dos resultados.
Ao contrário de circuitos digitais comuns, acelerômetros MEMS são sensíveis não apenas ao movimento, mas também à flexão da PCB, ao estresse termomecânico, a fontes de calor próximas, a vibrações de componentes vizinhos e até a efeitos relacionados à montagem e soldagem.
Por isso, o design de uma PCB com acelerômetro deve ser tratado sob duas perspectivas ao mesmo tempo: elétrica e mecânica. A posição do sensor, o footprint, a simetria do roteamento e a qualidade da montagem têm impacto direto no desempenho final.
Por que o design de uma PCB com acelerômetro é diferente
Projetar uma PCB Accelerometer não é o mesmo que rotear um CI digital comum. Como o sensor mede movimento físico, ele também é sensível às condições mecânicas da própria placa.
A flexão da PCB, tensões localizadas na montagem e fontes de calor próximas podem afetar a saída do sensor. Em alguns casos, o acelerômetro pode interpretar esses efeitos como deriva de offset, ruído adicional ou até movimento falso.
É por isso que o layout da PCB é tão importante. Um dispositivo lógico pode tolerar pequenas imperfeições de layout sem impacto visível. Um acelerômetro, normalmente, não.
Problemas comuns relacionados à placa
- instabilidade de offset
- leituras falsas de movimento
- aumento de ruído
- deriva térmica
- inconsistência entre protótipos e produção em série
A ideia principal é simples: em um projeto com acelerômetro, a própria PCB faz parte do sistema de medição.
Como escolher o acelerômetro certo antes de iniciar o layout
Um bom layout começa com o sensor correto. A escolha ideal depende da aplicação, do nível de desempenho exigido e das restrições do sistema.
Aplicações típicas
- Wearables: baixo consumo e tamanho compacto
- Robótica: saída estável e boa resposta dinâmica
- Medição de inclinação: baixo ruído em baixas velocidades
- Monitoramento industrial: faixa de medição maior e maior robustez mecânica
- Eletrônicos de consumo: encapsulamento pequeno e integração simples com MCU
Especificações principais a avaliar
| Parâmetro | Por que é importante |
|---|---|
| Faixa de medição | Define quanto movimento ou impacto o sensor consegue medir |
| Densidade de ruído | Afeta a precisão em sinais pequenos |
| Largura de banda / ODR | Deve corresponder ao perfil de movimento da aplicação |
| Interface | I2C é mais simples; SPI pode oferecer mais velocidade e robustez |
| Tamanho do encapsulamento | Encapsulamentos menores economizam espaço, mas podem ser mais sensíveis ao layout |
Se o projeto precisa apenas de movimento linear, detecção de inclinação ou wake-up por movimento, um acelerômetro standalone costuma ser suficiente. Se também forem necessários dados de rotação ou fusão de sensores, uma IMU pode ser a melhor escolha.
Melhor posição para um acelerômetro na PCB
O posicionamento costuma ser a decisão mais importante no design de uma PCB Accelerometer. Um sensor bem posicionado pode melhorar estabilidade e precisão antes mesmo de o roteamento começar.
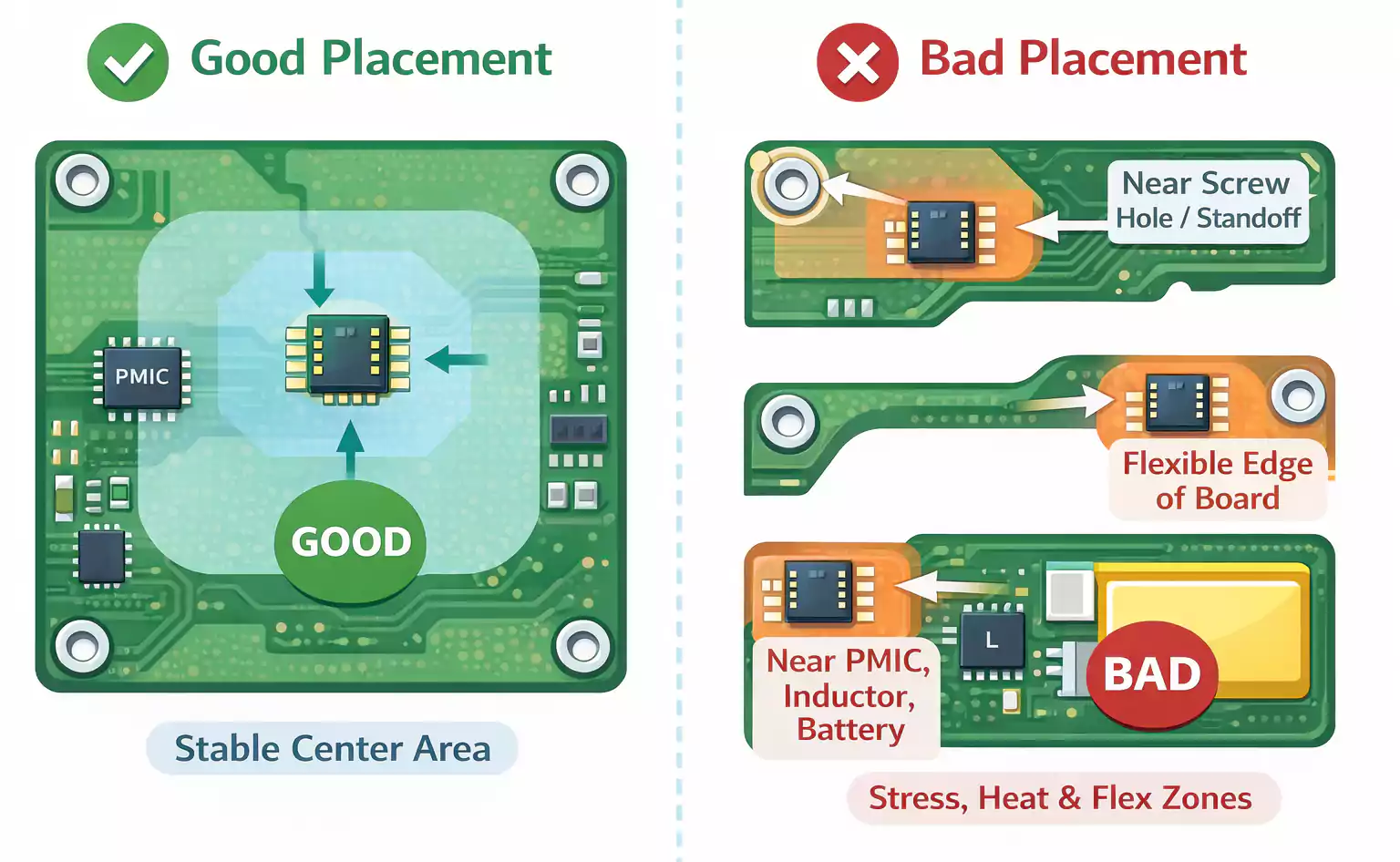
Mantenha o sensor longe de pontos de estresse mecânico
Evite colocar o acelerômetro perto de:
- furos de parafuso
- espaçadores
- áreas de encaixe por pressão
- blindagens metálicas
- pontos de pressão do gabinete
Essas áreas geralmente sofrem força localizada durante a montagem, o que pode deslocar o offset do sensor.
Evite regiões flexíveis da placa
Não coloque o sensor próximo de:
- bordas da placa
- extensões estreitas
- áreas próximas a recortes
- cantos sem suporte
- trechos em balanço
Essas regiões tendem a dobrar ou vibrar mais durante o manuseio e a operação.
Fique longe de fontes de calor
Procure manter o acelerômetro distante de:
- processadores
- PMICs
- circuitos de carregamento
- baterias
- trilhas de alta corrente
- indutores de potência
O aquecimento local pode aumentar a deriva e reduzir a estabilidade da medição.
Observe fontes de vibração próximas
Componentes ao redor podem injetar ruído mecânico indesejado na placa, como:
- alto-falantes
- motores hápticos
- ventiladores
- relés
- estágios de alimentação chaveada
Em geral, a melhor posição é uma região mecanicamente estável, termicamente mais calma e distante de pontos de fixação e de fontes de vibração.
Regras de footprint para acelerômetros em PCB
Depois que o posicionamento está definido, o footprint passa a ser a próxima prioridade. Em sensores MEMS, ele afeta diretamente tanto a qualidade da soldagem quanto a distribuição das tensões mecânicas.
Use o land pattern recomendado pelo fabricante
Sempre comece com as orientações oficiais do fabricante do sensor, incluindo:
- land pattern
- dimensões dos pads
- definição de solder mask
- recomendações de stencil
- notas de montagem
Não reutilize um footprint apenas porque ele “parece parecido” sem antes verificar o datasheet.
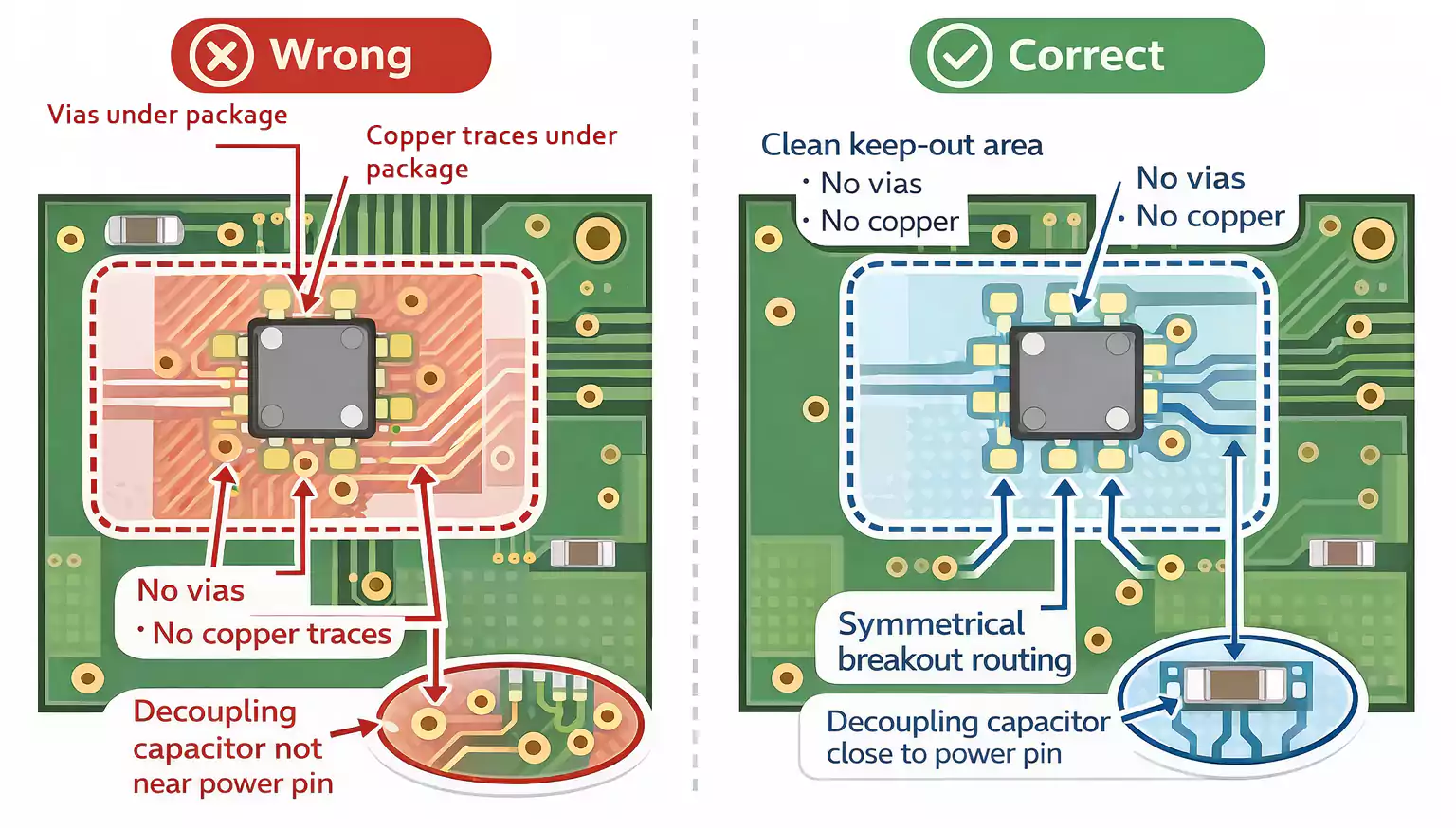
Não coloque vias sob o encapsulamento
Evite posicionar diretamente sob o sensor:
- vias
- trilhas na camada superior
- áreas densas de cobre
- estruturas mecânicas
Esses elementos podem prejudicar a planicidade, criar diferenças locais de rigidez e aumentar o estresse termomecânico.
Mantenha a área do sensor limpa
Um layout mais limpo ao redor do encapsulamento melhora a consistência da montagem e a estabilidade a longo prazo. Também facilita a inspeção e reduz tensões indesejadas ao redor do sensor.
Dicas de roteamento: mantenha o layout limpo e equilibrado
Do ponto de vista da velocidade de sinal, o roteamento de um acelerômetro normalmente não é complexo. Ainda assim, ele exige atenção.
O objetivo aqui não é um roteamento sofisticado. O objetivo é um layout curto, limpo e equilibrado.
Roteamento de alimentação
Coloque o capacitor de desacoplamento o mais próximo possível do pino de alimentação do sensor.
Boas práticas:
- manter a trilha de alimentação curta
- minimizar a área do loop
- conectar o terra de forma limpa
- evitar regiões de alimentação ruidosas
Estratégia de terra
O sensor deve ser conectado a uma referência elétrica estável. Isso significa:
- caminho de retorno de terra limpo
- evitar loops de corrente ruidosos perto do sensor
- manter ruído de fontes chaveadas longe da área de medição
Roteamento de I2C ou SPI
Para interfaces I2C ou SPI:
- mantenha as trilhas curtas e diretas
- evite desvios desnecessários
- não passe por zonas de alto ruído
- mantenha a área do sensor fácil de analisar e depurar
Use escape routing simétrico
A simetria do roteamento é mais importante do que muita gente imagina. Um breakout assimétrico pode gerar tensões desiguais após o reflow. Um roteamento mais equilibrado ajuda a reduzir esse risco.
PCB de 2 camadas ou 4 camadas?
As duas opções podem funcionar, dependendo do produto.
PCB de 2 camadas
- boa para projetos simples, compactos e sensíveis a custo
- adequada quando o ambiente elétrico é relativamente tranquilo
PCB de 4 camadas
- melhor para projetos com módulos sem fio, processadores ou fontes chaveadas
- facilita uma referência de terra mais limpa
- costuma ser melhor para estabilidade em sistemas mistos
Soldagem e montagem: fatores que afetam a precisão
A própria montagem pode afetar diretamente o desempenho do acelerômetro. Mesmo com um bom layout, condições ruins de soldagem podem reduzir precisão e repetibilidade.
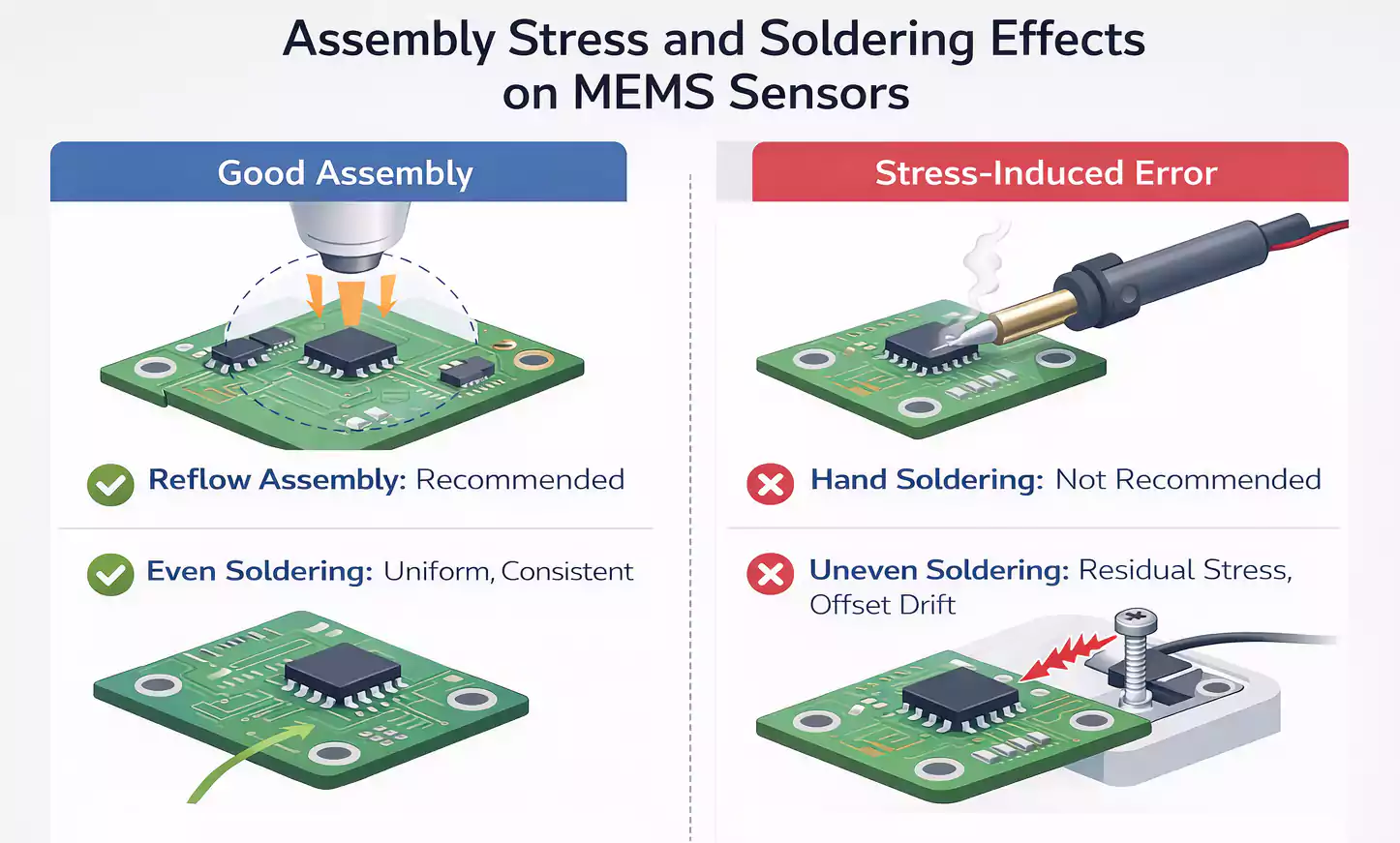
Reflow geralmente é a melhor opção
A maioria dos acelerômetros MEMS é projetada para montagem automática por reflow. A soldagem manual pode introduzir:
- aquecimento desigual
- tensões residuais
- formação inconsistente de juntas de solda
A consistência da pasta de solda importa
Se a deposição de pasta de solda for irregular, o encapsulamento pode se assentar de forma desigual. Isso pode causar:
- variações de offset
- tensões induzidas pela montagem
- diferenças entre placas
Deixe espaço ao redor do sensor
Evite cercar o sensor com componentes pesados, fixadores ou estruturas mecânicas grandes. O layout precisa fazer sentido mecanicamente no produto final, e não apenas no CAD.
Espere alguma variação após a montagem
Pequenas mudanças de offset após o reflow ou a montagem final no gabinete são normais. O objetivo não é eliminar totalmente esses efeitos, mas reduzi-los com um bom layout e verificá-los durante os testes.
Verificações após a montagem e calibração básica
Depois da montagem, a placa deve ser avaliada como um sistema completo de detecção de movimento, e não apenas como uma PCB energizada.
Verificações iniciais de bring-up
Comece pelo básico:
- confirmar que a alimentação está estável
- verificar a comunicação com o sensor
- ler o device ID ou os registradores de status
- confirmar o mapeamento dos eixos em hardware e firmware
Verificação estática de plausibilidade
Com a placa parada, verifique se a saída do acelerômetro faz sentido para a orientação da placa. Isso ajuda a identificar:
- problemas graves de offset
- erros de mapeamento de eixo
- problemas causados pela montagem
Calibração básica
Em muitos produtos de consumo, uma simples correção de offset no firmware já basta. Em projetos mais exigentes, pode ser necessária uma calibração em nível de sistema para considerar:
- efeitos do gabinete
- forma de fixação da placa
- comportamento térmico
- alinhamento do sistema como um todo
O ideal é fazer a calibração no produto já montado, e não apenas em um protótipo de placa nua.
Erros mais comuns no design de PCB com acelerômetro
Entre os erros mais frequentes estão:
- posicionar o sensor perto de furos de parafuso ou espaçadores
- colocá-lo ao lado de componentes quentes
- rotear vias ou trilhas sob o encapsulamento
- ignorar a flexão da placa perto de bordas ou recortes
- usar breakout routing assimétrico
- soldar manualmente um encapsulamento projetado para reflow
- pular a validação pós-montagem
Esses erros são traiçoeiros porque a placa ainda pode ligar e se comunicar normalmente. Os problemas reais costumam aparecer depois, na forma de deriva, ruído ou leituras instáveis.
Checklist antes de liberar para fabricação
Antes de enviar a placa para produção, vale revisar os seguintes pontos:
- o sensor escolhido realmente atende à aplicação
- o posicionamento está longe de parafusos, blindagens e fontes de calor
- a região escolhida na PCB é mecanicamente estável
- não há vias nem cobre desnecessário sob o encapsulamento
- o breakout routing está razoavelmente simétrico
- o desacoplamento está próximo dos pinos de alimentação
- o sensor possui uma referência elétrica limpa
- o processo de montagem é adequado ao encapsulamento
- as verificações de eixo e zero-g após a montagem estão previstas
Um checklist simples como esse pode evitar muito tempo de depuração depois.
Conclusão
Uma PCB Accelerometer confiável depende de mais do que uma conexão elétrica correta. As decisões de layout determinam diretamente o quanto o sensor vai responder ao movimento real, e não a estresse mecânico, calor, vibração ou efeitos de montagem.
Na prática, um bom desempenho depende de alguns fundamentos:
- posicionamento correto do sensor
- footprint limpo
- roteamento equilibrado
- montagem controlada
- validação prática após a fabricação
Quando esses pontos são bem tratados, a placa fica mais fácil de calibrar, mais estável em operação e mais consistente ao longo do tempo.
Na FastTurnPCB, sabemos que placas com sensores de precisão exigem mais do que regras padrão de layout de PCB. Em projetos com acelerômetros e outras aplicações de motion sensing, um layout fabricável e atenção aos fatores mecânicos fazem toda a diferença para obter resultados confiáveis.