El diseño de una PCB Accelerometer va mucho más allá de la simple conexión del sensor a un microcontrolador. En aplicaciones reales, el layout de la PCB influye directamente en la precisión de la medición, la estabilidad y la repetibilidad del rendimiento.
A diferencia de los circuitos digitales convencionales, los acelerómetros MEMS no solo son sensibles al movimiento, sino también a la flexión de la PCB, al estrés termomecánico, a las fuentes de calor cercanas, a las vibraciones de componentes próximos y a los efectos relacionados con el montaje y la soldadura.
Por eso, el diseño de una PCB con acelerómetro debe abordarse desde dos perspectivas al mismo tiempo: la eléctrica y la mecánica. La posición del sensor, el diseño del footprint, la simetría del rutado y la calidad del ensamblaje influyen de forma decisiva en el rendimiento final.
Por qué el diseño de una PCB Accelerometer es diferente
El diseño de una PCB Accelerometer no es igual que el rutado de un circuito digital estándar. Como el sensor mide movimiento físico, también es sensible al estado mecánico de la propia placa.
La flexión de la placa, las tensiones localizadas en los puntos de fijación y las fuentes de calor cercanas pueden afectar a la salida del sensor. En algunos casos, el acelerómetro puede interpretar estos efectos como deriva de offset, ruido adicional o incluso movimiento falso.
Por eso el layout de la PCB es tan importante. Un dispositivo lógico puede tolerar pequeñas imperfecciones de diseño sin un impacto visible. Un acelerómetro, por lo general, no.
Problemas habituales relacionados con la placa
- inestabilidad del offset
- lecturas falsas de movimiento
- aumento del ruido
- deriva térmica
- resultados inconsistentes entre prototipos y producción
La idea principal es sencilla:
en un diseño con acelerómetro, la propia PCB forma parte del sistema de medida.
Cómo elegir el acelerómetro adecuado antes de empezar el layout
Un buen layout empieza con el sensor correcto. La mejor elección depende de la aplicación, del nivel de prestaciones requerido y de las limitaciones del sistema.
Aplicaciones habituales
- Wearables: bajo consumo y tamaño compacto
- Robótica: salida estable y buena respuesta dinámica
- Medición de inclinación: bajo ruido a baja velocidad
- Monitorización industrial: mayor rango de medida y mejor robustez mecánica
- Electrónica de consumo: encapsulado pequeño e integración sencilla con el MCU
Especificaciones clave que conviene revisar
| Parámetro | Por qué importa |
|---|---|
| Rango de medida | Define cuánta aceleración o impacto puede detectar el sensor |
| Densidad de ruido | Afecta a la precisión en señales pequeñas |
| Ancho de banda / ODR | Debe ajustarse al perfil de movimiento que se quiere medir |
| Interfaz | I2C es más simple; SPI puede ofrecer más velocidad y robustez |
| Tamaño del encapsulado | Los encapsulados pequeños ahorran espacio, pero suelen ser más sensibles al layout |
Si el diseño solo necesita movimiento lineal, detección de inclinación o wake-up por movimiento, un acelerómetro independiente suele ser suficiente. Si además necesita datos de giro o fusión de sensores, probablemente una IMU sea la opción más adecuada.
Mejor ubicación para un acelerómetro en una PCB
La colocación suele ser la decisión más importante en el diseño de una PCB Accelerometer. Un sensor bien ubicado puede mejorar la estabilidad y la precisión incluso antes de empezar el rutado.
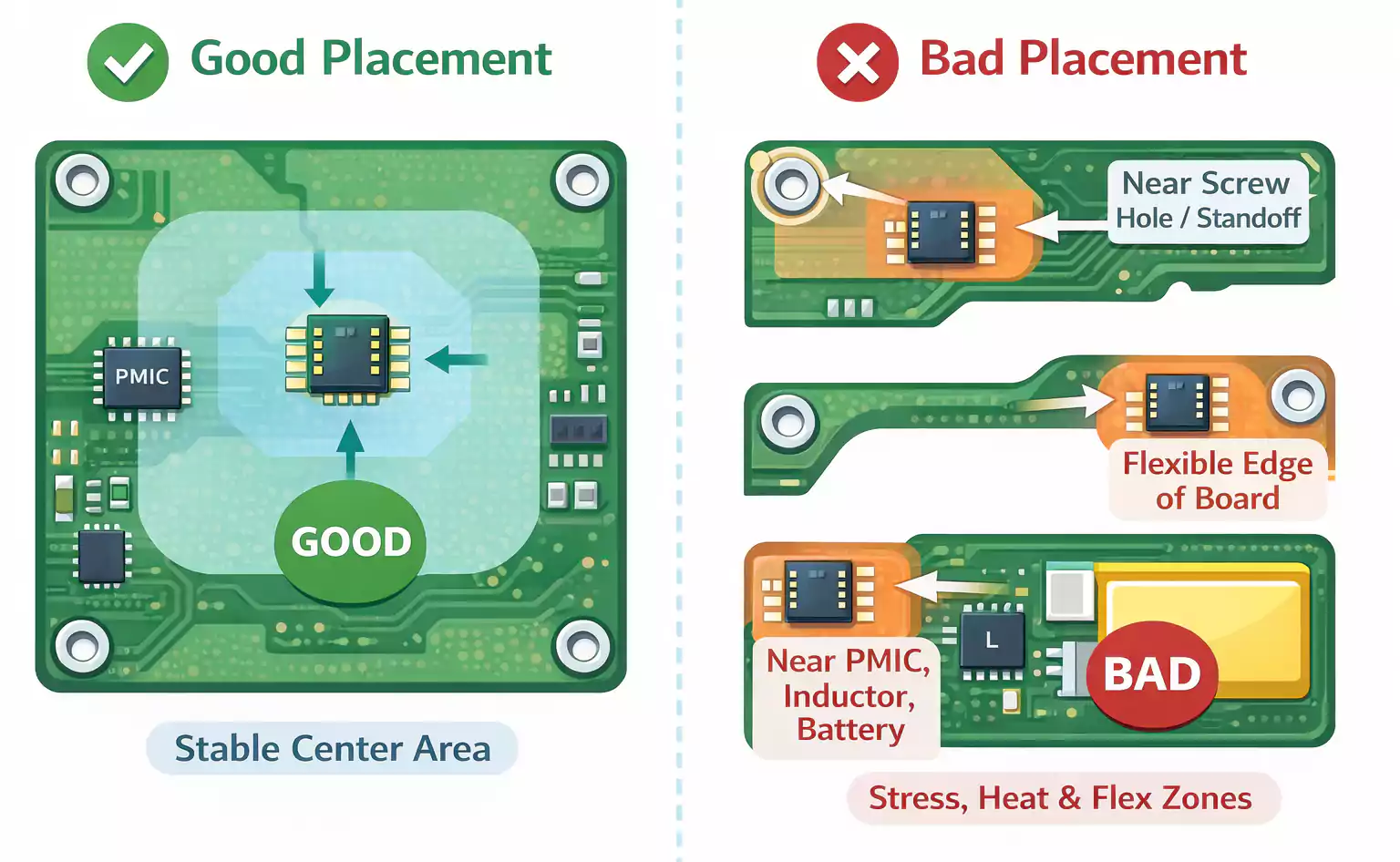
Mantén el sensor alejado de zonas con estrés mecánico
Evita colocar el acelerómetro cerca de:
- agujeros para tornillos
- separadores
- zonas de encaje a presión
- blindajes metálicos
- puntos de presión del chasis o carcasa
Estas zonas suelen sufrir fuerzas localizadas durante el ensamblaje, lo que puede desplazar el offset del sensor.
Evita regiones flexibles de la placa
No coloques el sensor cerca de:
- bordes de la placa
- prolongaciones estrechas
- zonas próximas a recortes
- esquinas sin soporte
- secciones en voladizo
Estas áreas tienen más probabilidad de doblarse o vibrar durante la manipulación y el funcionamiento.
Aléjalo de las fuentes de calor
Conviene mantener el acelerómetro lejos de:
- procesadores
- PMIC
- circuitos de carga
- baterías
- pistas de alta corriente
- inductores de potencia
El calentamiento local puede aumentar la deriva y reducir la estabilidad de la medida.
Vigila las fuentes de vibración
Los componentes cercanos pueden introducir ruido mecánico no deseado en la placa, por ejemplo:
- altavoces
- motores hápticos
- ventiladores
- relés
- etapas de alimentación conmutada
En la práctica, la mejor ubicación suele ser una zona mecánicamente estable, térmicamente tranquila y alejada de puntos de fijación y de fuentes de vibración.
Reglas de footprint para acelerómetros en PCB
Una vez definida la ubicación, el siguiente punto crítico es el footprint. En sensores MEMS, el footprint afecta tanto a la calidad de la soldadura como a la distribución de tensiones mecánicas.
Utiliza el land pattern recomendado por el fabricante
Lo correcto es partir siempre de las recomendaciones oficiales del fabricante del sensor, incluyendo:
- land pattern
- dimensiones de los pads
- definición de solder mask
- recomendaciones de stencil
- notas de ensamblaje
No conviene reutilizar un footprint “parecido” sin revisar antes la hoja de datos.
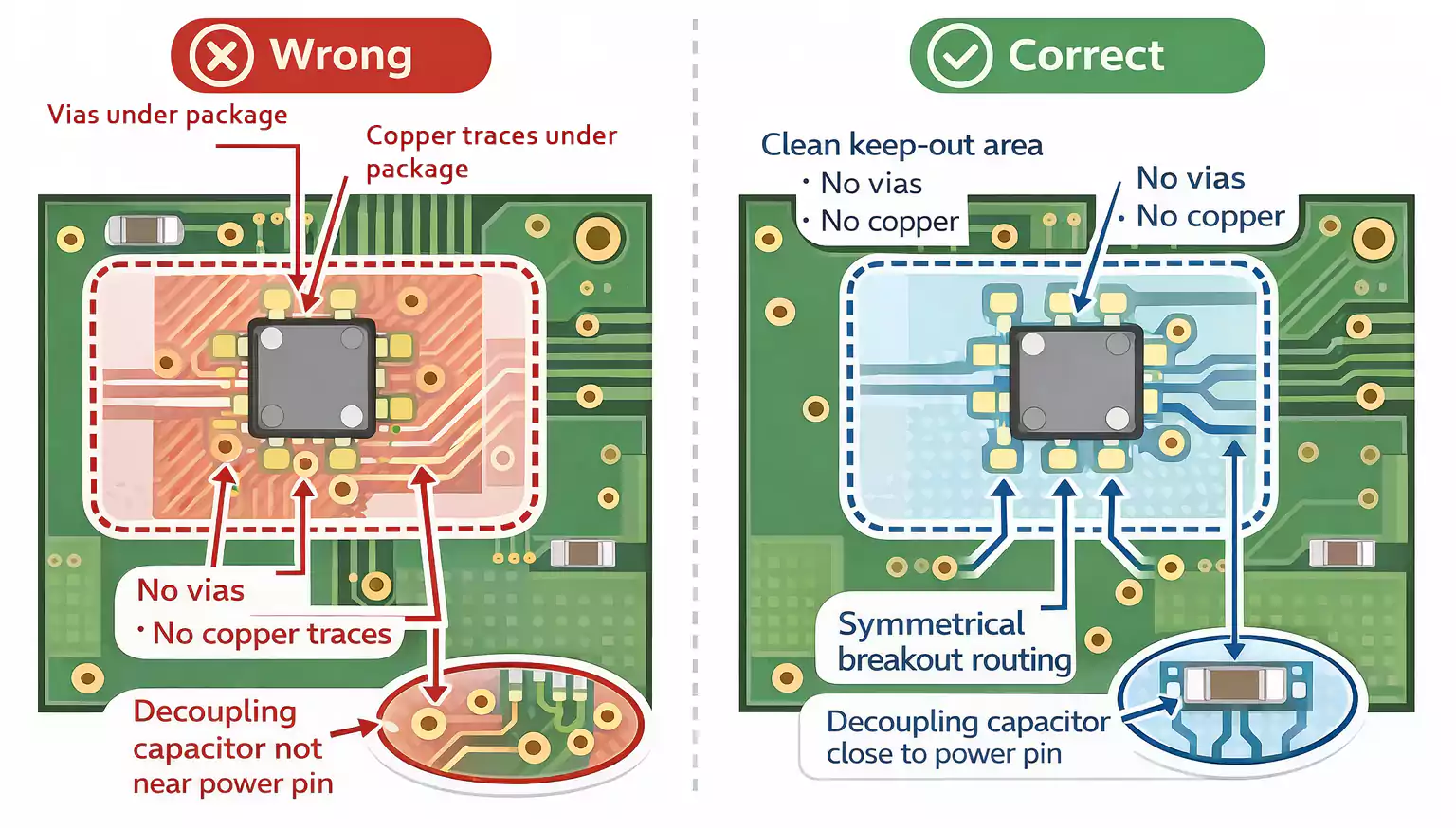
No coloques vías bajo el encapsulado
Evita situar directamente bajo el sensor:
- vías
- pistas en la capa superior
- zonas densas de cobre
- estructuras mecánicas
Estos elementos pueden afectar a la planitud, crear diferencias locales de rigidez y aumentar el estrés termomecánico.
Mantén limpia el área del sensor
Una zona más despejada alrededor del encapsulado mejora la consistencia del ensamblaje y la estabilidad a largo plazo. Además, facilita la inspección y reduce tensiones no deseadas alrededor del sensor.
Consejos de rutado: mantén el layout limpio y equilibrado
Desde el punto de vista de la velocidad de señal, el rutado de un acelerómetro no suele ser especialmente complejo. Aun así, requiere atención.
El objetivo aquí no es un rutado sofisticado. El objetivo es un layout corto, limpio y equilibrado.
Rutado de alimentación
Coloca el condensador de desacoplo lo más cerca posible del pin de alimentación del sensor.
Buenas prácticas:
- mantener la pista de alimentación corta
- minimizar el área del bucle
- conectar la masa de forma limpia
- evitar zonas de alimentación ruidosas
Estrategia de masa
El sensor debe estar conectado a una referencia eléctrica estable. Esto implica:
- un camino de retorno de masa limpio
- evitar lazos de corriente ruidosos cerca del sensor
- mantener el ruido de las fuentes conmutadas alejado de la zona de medida
Rutado de I2C o SPI
Para interfaces I2C o SPI:
- mantén las pistas cortas y directas
- evita rodeos innecesarios
- no atravieses zonas con mucho ruido
- deja la sección del sensor fácil de revisar y depurar
Utiliza una salida de pads simétrica
La simetría del rutado importa más de lo que parece. Un breakout asimétrico puede generar tensiones desiguales tras el reflow. Un escape más equilibrado ayuda a reducir ese riesgo.
¿PCB de 2 capas o de 4 capas?
Ambas opciones pueden funcionar, según el producto.
PCB de 2 capas
- adecuada para diseños sencillos, compactos y sensibles al coste
- válida si el entorno eléctrico es relativamente tranquilo
PCB de 4 capas
- mejor para diseños con módulos inalámbricos, procesadores o fuentes conmutadas
- facilita una referencia de masa más limpia
- suele ofrecer mejor estabilidad en sistemas mixtos
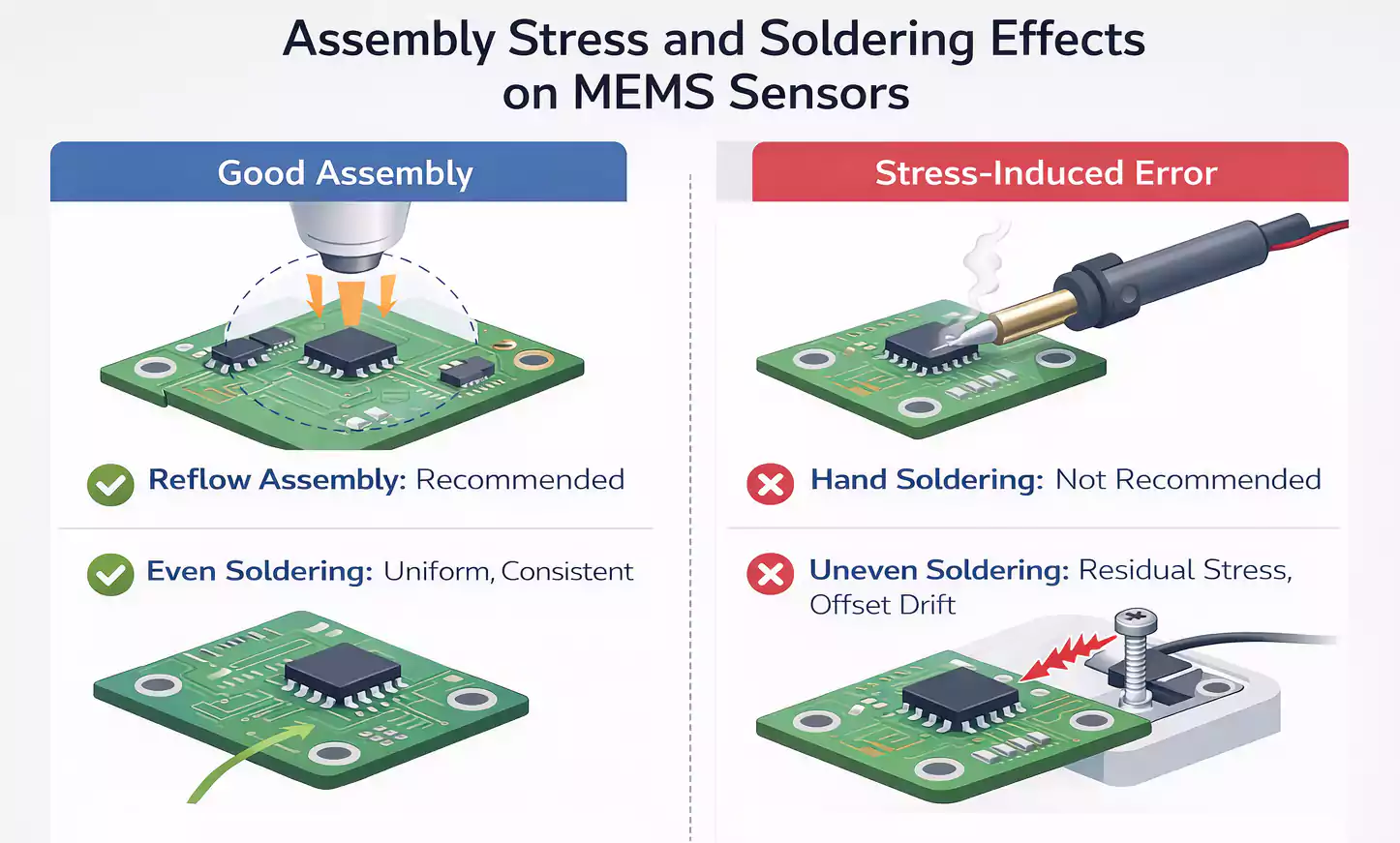
Soldadura y ensamblaje: factores que afectan a la precisión
El propio proceso de montaje puede afectar directamente al rendimiento del acelerómetro. Incluso con un buen layout, unas condiciones de soldadura deficientes pueden reducir la precisión y la repetibilidad.
El reflow suele ser la mejor opción
La mayoría de acelerómetros MEMS están pensados para montaje automático por reflow. La soldadura manual puede introducir:
- calentamiento desigual
- tensiones residuales
- uniones de soldadura inconsistentes
La consistencia de la pasta de soldar importa
Si la deposición de pasta de soldar es irregular, el encapsulado puede asentarse de forma desigual. Esto puede provocar:
- variaciones de offset
- tensiones inducidas por el montaje
- diferencias entre placas
Deja espacio alrededor del sensor
No conviene rodear el sensor con componentes pesados, fijaciones o estructuras mecánicas grandes. El layout debe seguir teniendo sentido mecánico en el producto final, no solo en CAD.
Asume cierto desplazamiento tras el ensamblaje
Pequeños cambios de offset después del reflow o del montaje final en la carcasa son normales. El objetivo no es eliminarlos por completo, sino reducirlos mediante un buen diseño y verificarlos durante las pruebas.
Verificaciones tras el ensamblaje y calibración básica
Una vez montada, la placa debe evaluarse como un sistema completo de detección de movimiento, no solo como una PCB alimentada.
Comprobaciones iniciales de puesta en marcha
Empieza por lo básico:
- confirmar que la alimentación es estable
- verificar la comunicación con el sensor
- leer el device ID o los registros de estado
- confirmar el mapeo de ejes en hardware y firmware
Comprobación estática de plausibilidad
Con la placa en reposo, comprueba que la salida del acelerómetro tiene sentido para la orientación real de la placa. Esto ayuda a detectar:
- problemas importantes de offset
- errores de mapeo de ejes
- problemas relacionados con el montaje
Calibración básica
En muchos productos de consumo, una simple corrección de offset en firmware es suficiente. En diseños más exigentes, puede hacer falta una calibración a nivel de sistema para tener en cuenta:
- efectos de la carcasa
- forma de montaje de la placa
- comportamiento térmico
- alineación global del sistema
Lo ideal es realizar la calibración sobre el producto ya ensamblado, no solo sobre una placa desnuda de prototipo.
Errores más comunes en el diseño de una PCB con acelerómetro
Entre los errores más habituales están:
- colocar el sensor cerca de tornillos o separadores
- situarlo junto a componentes calientes
- rutear vías o pistas bajo el encapsulado
- ignorar la flexión de la placa cerca de bordes o recortes
- usar un breakout asimétrico
- soldar manualmente un encapsulado pensado para reflow
- omitir la validación después del montaje
Estos errores son especialmente engañosos porque la placa puede encender y comunicarse con normalidad. Los problemas reales suelen aparecer más tarde, en forma de deriva, ruido o lecturas inestables.
Lista de comprobación antes de pasar a fabricación
Antes de enviar la placa a producción, conviene revisar lo siguiente:
- el sensor elegido se ajusta realmente a la aplicación
- su ubicación está lejos de tornillos, blindajes y fuentes de calor
- la zona elegida de la PCB es mecánicamente estable
- no hay vías ni cobre innecesario bajo el encapsulado
- el breakout routing es razonablemente simétrico
- el desacoplo está cerca de los pines de alimentación
- el sensor dispone de una referencia eléctrica limpia
- el proceso de ensamblaje es adecuado para el encapsulado
- las comprobaciones de ejes y zero-g tras el montaje están previstas
Una lista sencilla como esta puede ahorrar muchas horas de depuración después.
Conclusión
Una PCB Accelerometer fiable depende de mucho más que una simple conectividad eléctrica correcta. Las decisiones de layout determinan directamente hasta qué punto el sensor responderá al movimiento real, y no a tensiones mecánicas, calor, vibración o efectos de montaje.
En la práctica, un buen rendimiento se basa en unos pocos principios fundamentales:
- una colocación correcta del sensor
- un footprint limpio
- un rutado equilibrado
- un montaje controlado
- una validación práctica tras la fabricación
Cuando estos aspectos se resuelven bien, la placa es más fácil de calibrar, más estable en funcionamiento y más consistente con el paso del tiempo.
En FastTurnPCB, sabemos que las placas con sensores de precisión requieren más que las reglas estándar de layout de PCB. En proyectos con acelerómetros y otras aplicaciones de motion sensing, un diseño fabricable y una buena comprensión de los factores mecánicos marcan la diferencia para obtener resultados fiables.