תכנון של PCB Accelerometer הוא הרבה יותר מחיבור פשוט של החיישן למיקרו־בקר. במוצרים אמיתיים, ל־PCB layout יש השפעה ישירה על דיוק המדידה, יציבות הביצועים ויכולת החזרתיות בין אבטיפוס לייצור סדרתי.
בשונה מ־IC דיגיטלי רגיל, חיישני תאוצה מסוג MEMS רגישים לא רק לתנועה עצמה, אלא גם ל־כיפוף של ה־PCB, מאמצים תרמו־מכניים, מקורות חום סמוכים, רעידות ממכלולים שכנים וגם להשפעות שנובעות מ־הרכבה והלחמה.
לכן, תכנון של PCB עבור accelerometer חייב להיעשות משתי זוויות במקביל: חשמלית ומכנית. מיקום החיישן, תכנון ה־footprint, סימטריית הניתוב ואיכות ההרכבה משפיעים כולם באופן ישיר על הביצועים הסופיים.
למה תכנון של PCB Accelerometer שונה מתכנון רגיל?
תכנון של PCB Accelerometer אינו דומה לניתוב של רכיב דיגיטלי סטנדרטי. מכיוון שהחיישן מודד תנועה פיזית, הוא רגיש גם למצב המכני של הלוח עצמו.
כיפוף של הלוח, מאמץ מקומי סביב נקודות עיגון, או מקור חום שנמצא בקרבת מקום, עלולים להשפיע על אות היציאה של החיישן. במקרים מסוימים, החיישן עלול לפרש את ההשפעות האלה כ־סטיית offset, רעש נוסף, או אפילו תנועה שאינה אמיתית.
בדיוק בגלל זה ה־PCB layout כל כך חשוב. רכיב לוגי רגיל יכול לעיתים לסבול פגמים קטנים בתכנון בלי השפעה מורגשת. חיישן תאוצה בדרך כלל לא.
בעיות נפוצות שקשורות ל־PCB
- חוסר יציבות ב־offset
- קריאות תנועה שגויות
- רמת רעש גבוהה יותר
- drift תרמי
- הבדלים בין אבטיפוסים לבין יחידות ייצור
הנקודה המרכזית פשוטה:
בתכנון עם accelerometer, ה־PCB עצמו הוא חלק ממערכת המדידה.
איך לבחור את חיישן התאוצה המתאים לפני שמתחילים את ה־Layout
Layout טוב מתחיל בבחירה נכונה של החיישן. הבחירה המתאימה תלויה ביישום, ברמת הביצועים הנדרשת ובמגבלות המערכת.
יישומים נפוצים
- מוצרים לבישים: צריכת חשמל נמוכה ומבנה קומפקטי
- רובוטיקה: אות יציב ותגובה דינמית טובה
- מדידת הטיה וכיוון: ביצועים עם רעש נמוך במהירויות נמוכות
- ניטור תעשייתי: טווח מדידה רחב יותר ועמידות מכנית גבוהה
- מוצרי צריכה: מארז קטן ואינטגרציה פשוטה עם MCU
פרמטרים עיקריים שכדאי לבדוק
| פרמטר | למה הוא חשוב |
|---|---|
| טווח מדידה | קובע איזו תנועה או מכה החיישן יכול למדוד |
| צפיפות רעש | משפיעה על הדיוק במדידות קטנות |
| רוחב פס / ODR | צריך להתאים לפרופיל התנועה הרצוי |
| ממשק | I2C פשוט יותר; SPI יכול לספק מהירות ועמידות טובות יותר |
| גודל המארז | מארז קטן חוסך מקום, אך לרוב רגיש יותר ל־layout |
אם המוצר צריך רק תנועה ליניארית, מדידת הטיה או זיהוי wake-up לפי תנועה, בדרך כלל מספיק accelerometer עצמאי. אם צריך גם מידע על סיבוב או sensor fusion, לרוב עדיף לבחור IMU.
מהו המיקום הטוב ביותר לחיישן תאוצה על גבי PCB
Placement הוא בדרך כלל ההחלטה החשובה ביותר בתכנון PCB Accelerometer. חיישן שממוקם נכון יכול לשפר יציבות ודיוק עוד לפני שמתחילים לנתב.
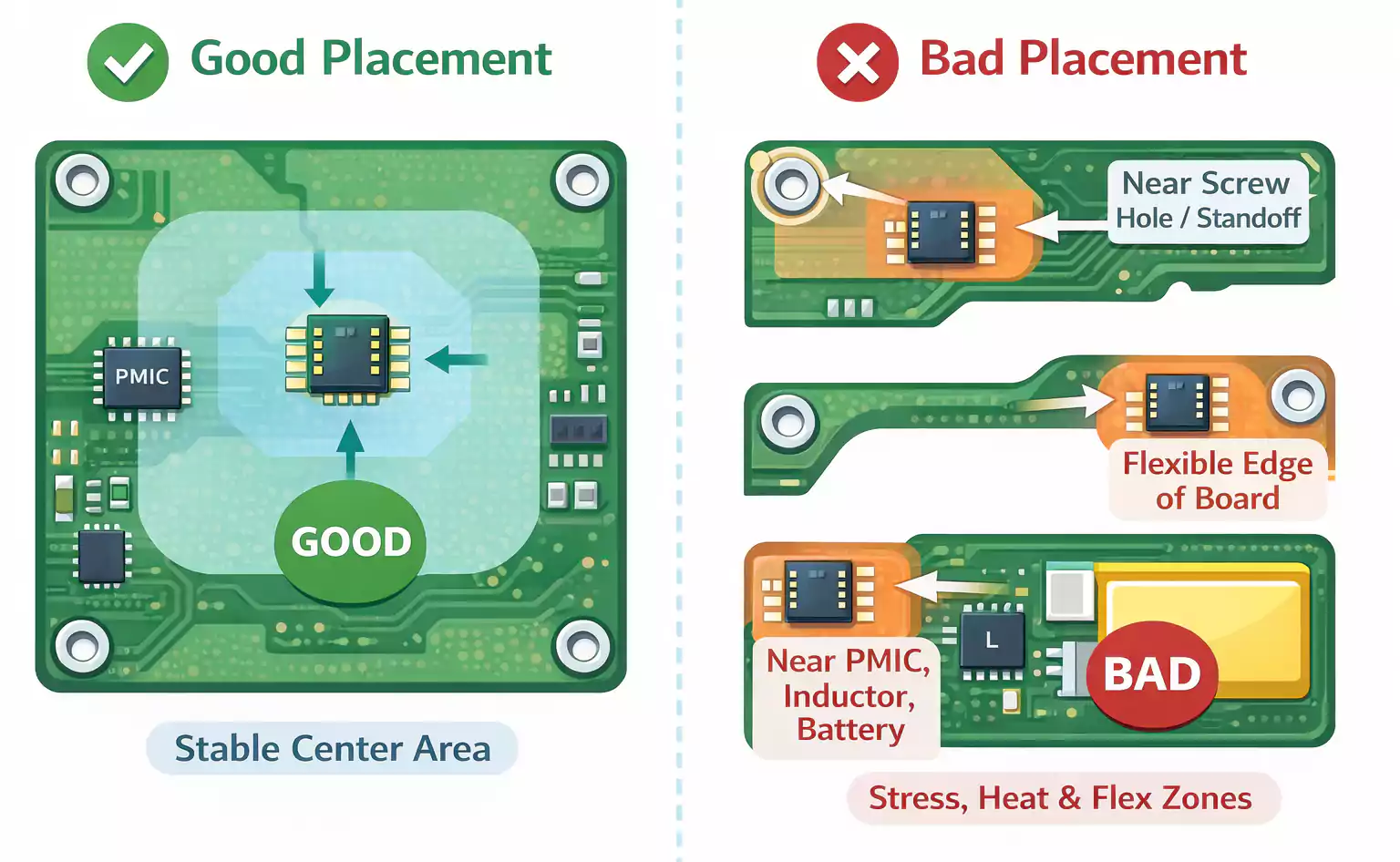
להרחיק את החיישן מאזורים עם מאמץ מכני
כדאי להימנע ממיקום של החיישן ליד:
- חורי ברגים
- מרווחים ומעמדים
- אזורי snap-fit
- מיגונים מתכתיים
- נקודות לחץ של המארז
אזורים כאלה חווים לעיתים עומס מקומי בזמן הרכבה, דבר שעלול לשנות את ה־offset של החיישן.
להימנע מאזורים גמישים בלוח
לא מומלץ למקם את החיישן ליד:
- קצות הלוח
- שלוחות צרות
- אזורים סמוכים לחיתוכים או פתחים
- פינות שאינן נתמכות
- חלקים תלויים של ה־PCB
אזורים כאלה נוטים יותר להתכופף או לרטוט בזמן שימוש או טיפול.
להתרחק ממקורות חום
רצוי להרחיק את חיישן התאוצה מ:
- מעבדים
- PMIC
- מעגלי טעינה
- סוללות
- מסלולים עם זרם גבוה
- משרנים
חימום מקומי עלול להגדיל drift ולפגוע ביציבות המדידה.
לקחת בחשבון מקורות רעידות
מכלולים סמוכים יכולים להעביר רעידות לא רצויות אל הלוח, למשל:
- רמקולים
- מנועים הפטיים
- מאווררים
- ממסרים
- שלבי מיתוג של ספקי כוח
ברוב המקרים, המקום הטוב ביותר לחיישן הוא אזור יציב מכנית, שקט תרמית, ורחוק ככל האפשר מנקודות עיגון וממקורות רעידות.
כללי Footprint עבור PCB Accelerometers
לאחר שהמיקום נקבע, ה־footprint הופך לנקודת המיקוד הבאה. בחיישני MEMS, ל־footprint יש השפעה ישירה גם על איכות ההלחמה וגם על פיזור המאמצים המכניים.
להתחיל תמיד מה־land pattern המומלץ של היצרן
צריך לעבוד לפי ההנחיות הרשמיות של יצרן החיישן, כולל:
- land pattern
- מידות pads
- הגדרת solder mask
- המלצות stencil
- הערות הרכבה
לא כדאי למחזר footprint “דומה” בלי לבדוק את ה־datasheet.
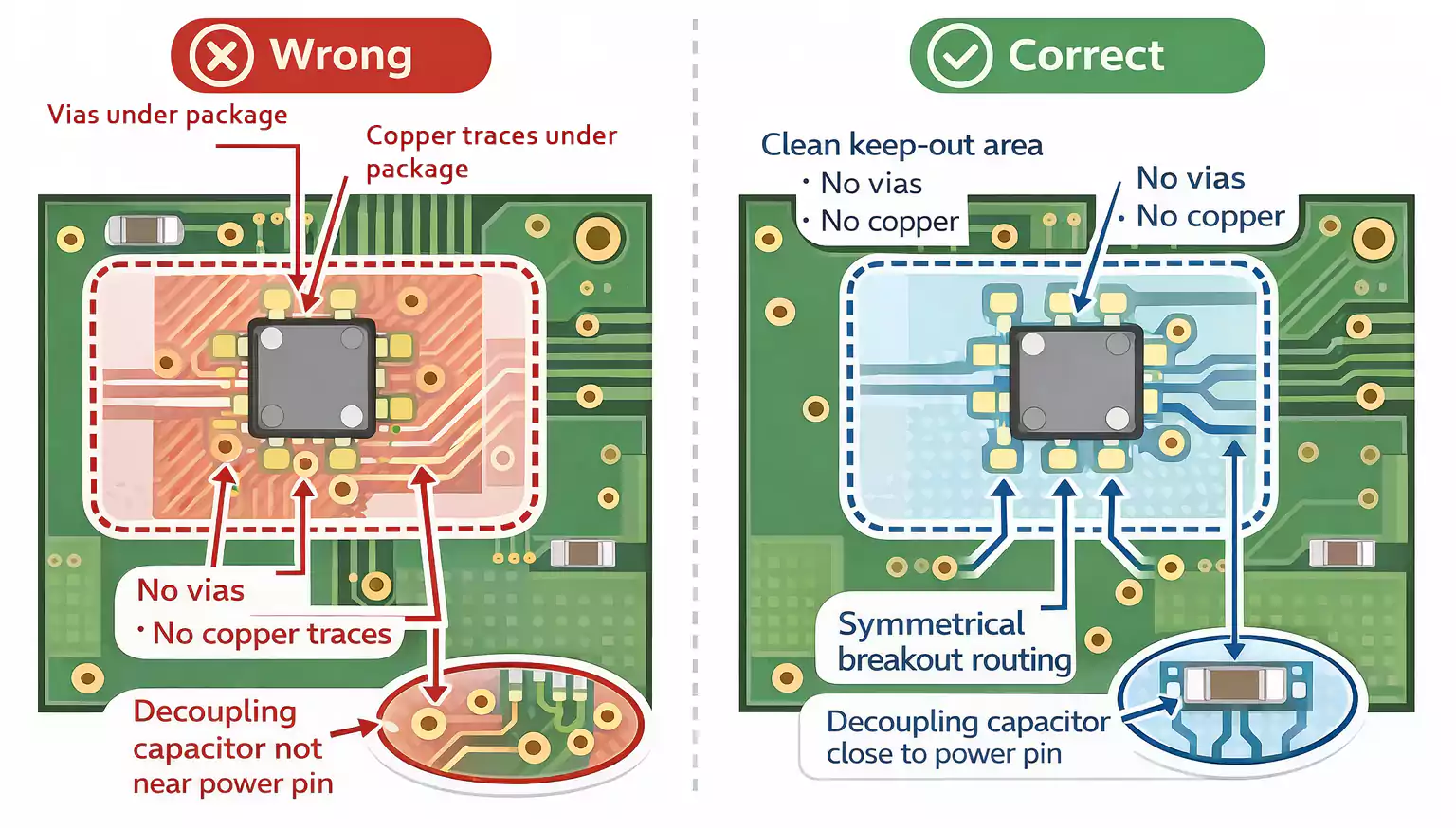
לא למקם vias מתחת למארז
יש להימנע מהצבת האלמנטים הבאים ישירות מתחת לחיישן:
- vias
- מסלולים בשכבה העליונה
- אזורי נחושת צפופים
- אלמנטים מכניים
אלמנטים כאלה עלולים לפגוע במישוריות, ליצור שינויי קשיחות מקומיים ולהגביר מאמצים תרמו־מכניים.
לשמור על אזור נקי סביב החיישן
Layout נקי יותר סביב המארז משפר גם את אחידות ההרכבה וגם את היציבות לאורך זמן. בנוסף, הוא מקל על בדיקה ומפחית מאמצים לא רצויים סביב החיישן.
טיפים לניתוב: לשמור על Layout נקי ומאוזן
מבחינת מהירות אות, ניתוב של accelerometer בדרך כלל אינו מסובך במיוחד, אבל עדיין דורש תכנון מוקפד.
המטרה כאן אינה ניתוב מורכב במיוחד, אלא ניתוב קצר, נקי ומאוזן.
ניתוב הזנה
יש למקם את קבל ה־decoupling קרוב ככל האפשר לפין ההזנה של החיישן.
Best practices:
- לשמור על מסלול הזנה קצר
- לצמצם שטח לולאה
- לחבר את ה־ground בצורה נקייה
- להימנע ממעבר דרך אזורי הזנה רועשים
אסטרטגיית הארקה
החיישן צריך להיות מחובר לייחוס חשמלי יציב. המשמעות היא:
- מסלול חזרת ground נקי
- הימנעות מלולאות זרם רועשות ליד החיישן
- הרחקת רעש של ספקי כוח ממותגים מאזור החישה
ניתוב I2C או SPI
בממשקי I2C או SPI מומלץ:
- לשמור על מסלולים קצרים וישירים
- להימנע מעיקופים מיותרים
- לא לעבור דרך אזורים עתירי רעש
- לשמור על אזור החיישן פשוט ונוח ל־debug
להשתמש ב־pad escape routing סימטרי
סימטריה בניתוב חשובה יותר ממה שנדמה. breakout לא סימטרי עלול ליצור מאמץ לא אחיד אחרי reflow, בעוד שניתוב מאוזן יותר מסייע להפחית את הסיכון הזה.
PCB דו־שכבתי או ארבע־שכבתי?
שתי האפשרויות יכולות לעבוד, בהתאם למוצר.
PCB דו־שכבתי
- מתאים לתכנונים פשוטים, קומפקטיים ורגישים לעלות
- יכול להספיק כאשר הסביבה החשמלית שקטה יחסית
PCB ארבע־שכבתי
- מתאים יותר כאשר יש מודולים אלחוטיים, מעבדים או ספקי כוח ממותגים
- מקל על שמירת ground reference נקי יותר
- לעיתים קרובות עדיף ליציבות של מערכות mixed-signal
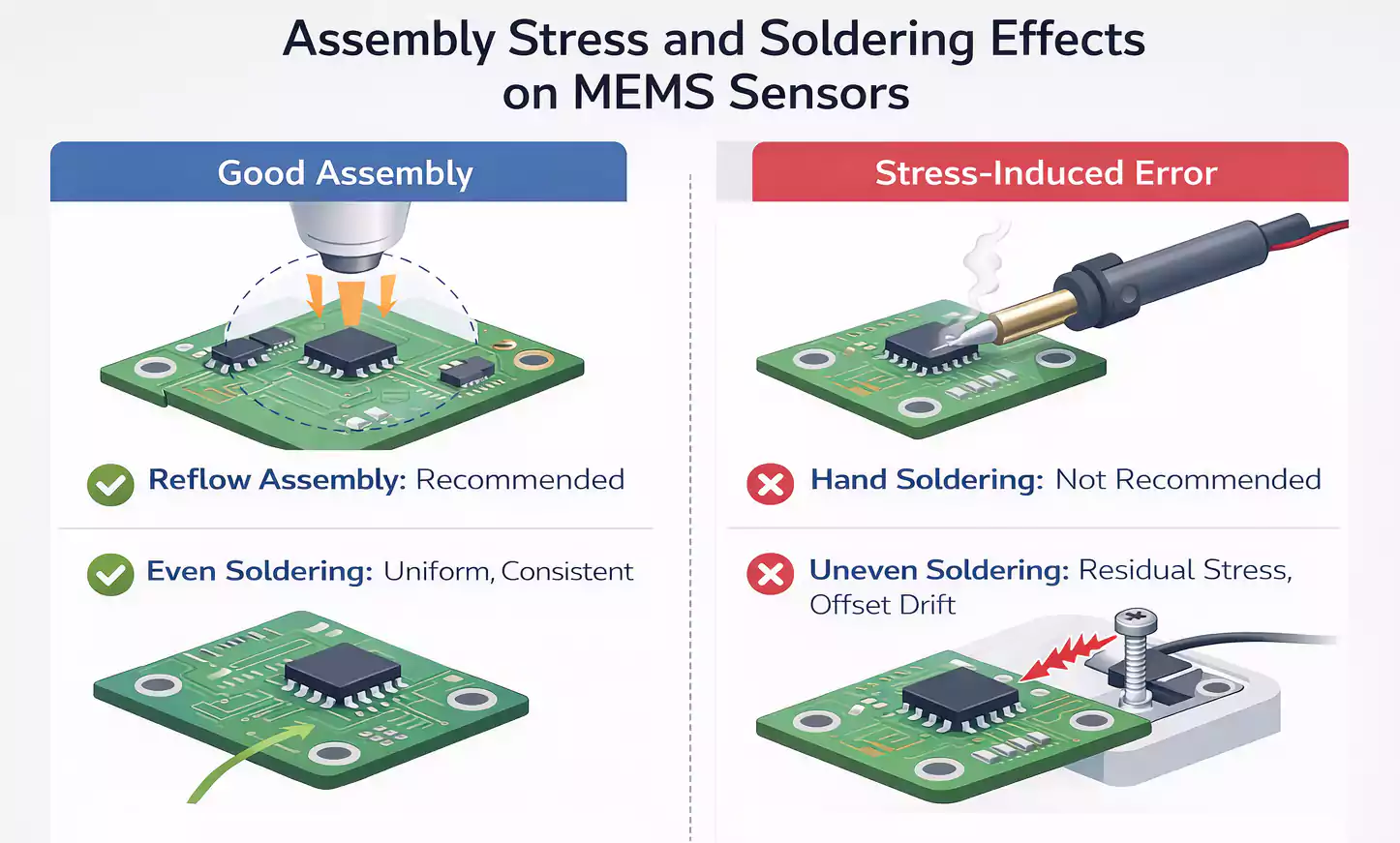
הלחמה והרכבה: גורמים שמשפיעים על דיוק החיישן
לתהליך ההרכבה עצמו יכולה להיות השפעה ישירה על ביצועי חיישן התאוצה. גם עם layout טוב, תנאי הלחמה לא טובים עלולים לפגוע בדיוק ובחזרתיות.
Reflow הוא בדרך כלל הבחירה המועדפת
רוב חיישני ה־MEMS מיועדים להרכבה אוטומטית בתהליך reflow. הלחמה ידנית עלולה לגרום ל:
- חימום לא אחיד
- מאמצים שיוריים
- חוסר אחידות במפרקי ההלחמה
עקביות של solder paste חשובה
פיזור לא אחיד של משחת הלחמה עלול לגרום לכך שהמארז ישב בצורה לא אחידה, מה שעלול להוביל ל:
- שינויי offset
- מאמץ שנובע מההרכבה
- שונות בין לוחות שונים
להשאיר מקום סביב החיישן
לא כדאי לצופף סביב החיישן רכיבים כבדים, מחברים מכניים או מבנים גדולים. ה־layout צריך להיות הגיוני מבחינה מכנית במוצר הסופי, לא רק בתוכנת ה־CAD.
לצפות לשינוי קטן אחרי הרכבה
שינויים קטנים ב־offset אחרי reflow או אחרי התקנת הלוח בתוך המארז הם דבר שכיח. המטרה אינה לבטל כל השפעה לחלוטין, אלא לצמצם אותה באמצעות תכנון נכון ולאמת אותה בבדיקות.
בדיקות לאחר הרכבה וכיול בסיסי
לאחר ההרכבה, צריך לבדוק את הלוח כ־מערכת מלאה לחישת תנועה, ולא רק כ־PCB שפועל חשמלית.
בדיקות bring-up ראשוניות
כדאי להתחיל מהבסיס:
- לוודא שההזנה יציבה
- לוודא שיש תקשורת עם החיישן
- לקרוא את device ID או status registers
- לאשר שמיפוי הצירים נכון גם בחומרה וגם בקושחה
בדיקת sanity סטטית
כאשר הלוח מונח במנוחה, יש לבדוק אם יציאת החיישן תואמת את כיוון הלוח בפועל. כך ניתן לזהות:
- בעיות offset משמעותיות
- טעויות במיפוי צירים
- בעיות שנגרמו כתוצאה מההרכבה
כיול בסיסי
במוצרים צרכניים רבים, תיקון offset פשוט בקושחה מספיק. בתכנונים מדויקים יותר, ייתכן שיידרש כיול ברמת המערכת כדי להביא בחשבון:
- השפעות של המארז
- אופן קיבוע הלוח
- התנהגות תרמית
- יישור כולל של המערכת
רצוי לבצע את הכיול על המוצר המורכב בפועל, ולא רק על אבטיפוס חשוף.
טעויות נפוצות בתכנון PCB Accelerometer
בין הטעויות הנפוצות ביותר:
- מיקום החיישן ליד חורי ברגים או מעמדים
- מיקום ליד רכיבים חמים
- ניתוב vias או מסלולים מתחת למארז
- התעלמות מכיפוף PCB ליד קצוות או פתחים
- breakout routing א־סימטרי
- הלחמה ידנית של מארז שמיועד ל־reflow
- דילוג על אימות אחרי הרכבה
הטעויות האלה מטעות במיוחד כי הלוח עדיין יכול להידלק ולתקשר כרגיל. הבעיות האמיתיות מופיעות לרוב מאוחר יותר, בצורת drift, רעש או קריאות לא יציבות.
Checklist לפני מעבר לייצור
לפני שמעבירים את התכנון לייצור, כדאי לעבור על הנקודות הבאות:
- החיישן שנבחר מתאים באמת ליישום
- המיקום שלו רחוק מברגים, מיגונים ומקורות חום
- האזור שנבחר על גבי ה־PCB יציב מבחינה מכנית
- אין vias או נחושת מיותרת מתחת למארז
- ה־breakout routing סימטרי במידה סבירה
- ה־decoupling קרוב לפיני ההזנה
- לחיישן יש ייחוס חשמלי נקי
- שיטת ההרכבה מתאימה למארז
- בדיקות צירים ו־zero-g אחרי הרכבה נכללות בתהליך האימות
Checklist פשוט כזה יכול לחסוך הרבה מאוד זמן של debug בהמשך.
סיכום
PCB Accelerometer אמין תלוי ביותר מאשר קישוריות חשמלית תקינה. החלטות layout קובעות ישירות עד כמה החיישן ימדוד תנועה אמיתית, ולא יושפע ממאמץ מכני, חום, רעידות או השפעות הרכבה.
בפועל, ביצועים טובים נשענים על כמה יסודות ברורים:
- מיקום נכון של החיישן
- footprint נקי
- ניתוב מאוזן
- הרכבה מבוקרת
- אימות מעשי אחרי הייצור
כאשר היסודות האלה מטופלים נכון, הלוח קל יותר לכיול, יציב יותר בעבודה, ושומר על עקביות לאורך זמן.
ב־FastTurnPCB אנחנו יודעים שלוחות חיישנים מדויקים דורשים יותר מכללי PCB layout סטנדרטיים. בתכנוני accelerometer וביישומי motion sensing אחרים, layout שמתאים לייצור יחד עם הבנה מכנית טובה הם המפתח לתוצאות אמינות.