La conception d’un PCB Accelerometer ne se limite pas à relier un capteur à un microcontrôleur. Dans un produit réel, le layout du PCB influence directement la précision de mesure, la stabilité et la répétabilité des performances.
Contrairement aux circuits numériques classiques, les accéléromètres MEMS ne réagissent pas uniquement au mouvement. Ils sont aussi sensibles à la flexion du PCB, aux contraintes thermomécaniques, aux sources de chaleur proches, aux vibrations générées par les composants voisins et aux effets liés à l’assemblage.
C’est pourquoi la conception d’un PCB pour accéléromètre doit être abordée à la fois sous l’angle électrique et mécanique. Le positionnement du capteur, la qualité de l’empreinte, la symétrie du routage et la qualité d’assemblage jouent tous un rôle important dans les performances globales.
Pourquoi la conception d’un PCB Accelerometer est différente
Concevoir un PCB Accelerometer n’a rien à voir avec le routage d’un simple circuit logique. Puisque le capteur mesure un mouvement physique, il est également sensible à l’état mécanique du PCB lui-même.
La flexion de la carte, les contraintes localisées au niveau des points de fixation et les sources de chaleur à proximité peuvent toutes modifier la sortie du capteur. Dans certains cas, l’accéléromètre peut interpréter ces effets comme une dérive d’offset, du bruit supplémentaire ou même un faux mouvement.
C’est pour cela que le layout est si important. Un composant logique peut souvent tolérer de petites imperfections de routage sans impact visible. Un accéléromètre, lui, beaucoup moins.
Problèmes courants liés au PCB
- instabilité de l’offset
- faux relevés de mouvement
- augmentation du bruit
- dérive thermique
- écarts entre prototypes et production série
L’idée essentielle est simple : dans une conception avec accéléromètre, le PCB fait partie intégrante du système de mesure.
Choisir le bon accéléromètre avant de commencer le layout
Un bon layout commence par le bon capteur. Le choix dépend avant tout de l’application, du niveau de performance attendu et des contraintes du système.
Exemples d’applications courantes
- Objets connectés et wearables : faible consommation et format compact
- Robotique : sortie stable et bonne réponse dynamique
- Mesure d’inclinaison : faible bruit à basse vitesse
- Surveillance industrielle : plage de mesure plus large et meilleure robustesse mécanique
- Électronique grand public : boîtier compact et intégration simple avec le MCU
Les caractéristiques à vérifier
Avant de figer le layout, il faut examiner les points suivants :
| Paramètre | Pourquoi c’est important |
|---|---|
| Plage de mesure | Détermine l’amplitude de mouvement ou de choc mesurable |
| Densité de bruit | Influence la précision sur les petits signaux |
| Bande passante / ODR | Doit correspondre au profil de mouvement visé |
| Interface | I2C est simple ; SPI peut offrir plus de rapidité et de robustesse |
| Taille du boîtier | Les petits boîtiers gagnent de la place, mais sont souvent plus sensibles au layout |
Si le design doit seulement gérer le mouvement linéaire, l’inclinaison ou une fonction de réveil, un accéléromètre seul suffit généralement. En revanche, si l’application nécessite aussi des données de rotation ou de la fusion de capteurs, un IMU sera souvent plus adapté.
Le meilleur emplacement pour un accéléromètre sur un PCB
Le placement est souvent la décision la plus importante dans la conception d’un PCB Accelerometer. Un capteur bien positionné peut améliorer la stabilité et la précision avant même le début du routage.
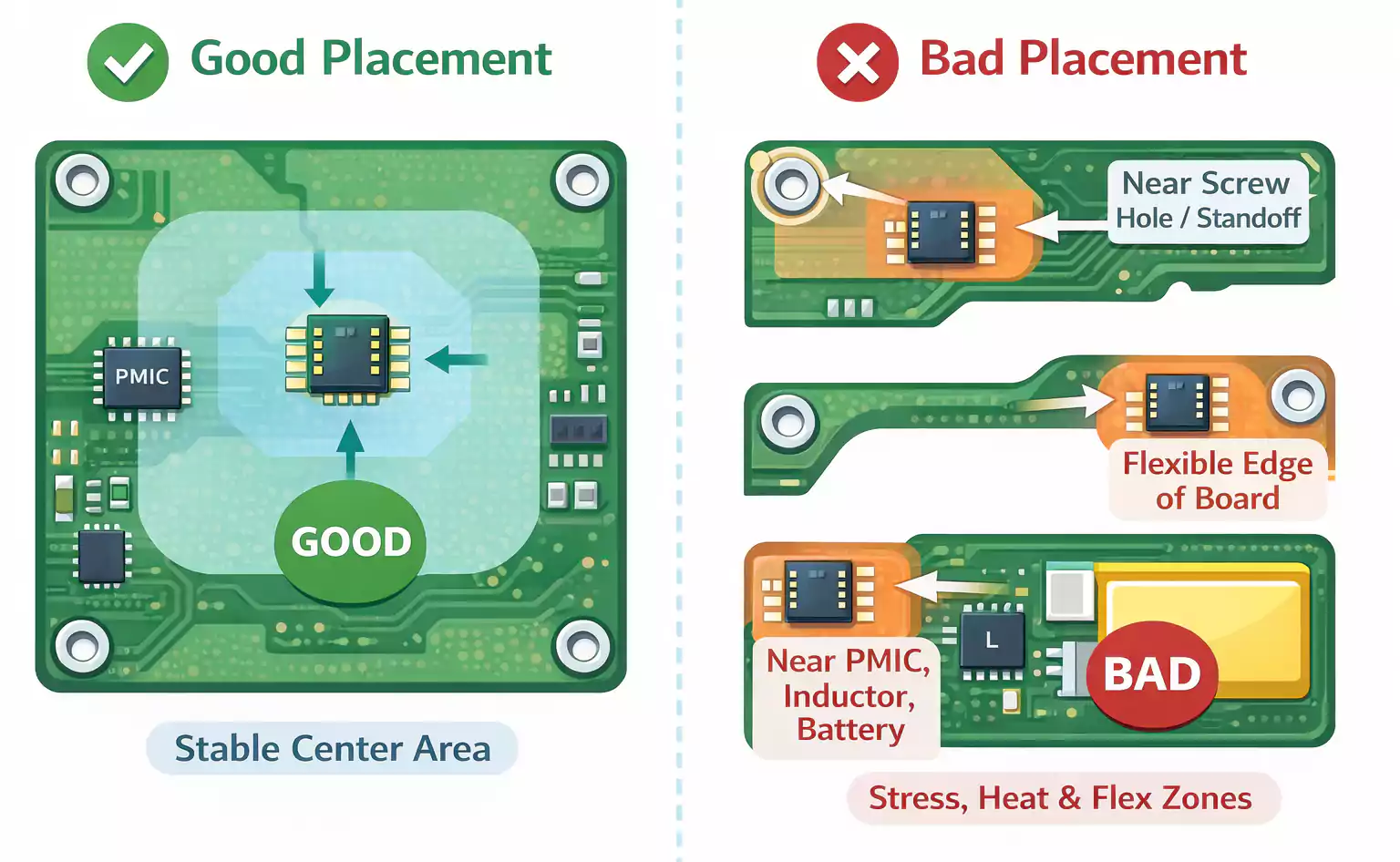
Éloigner le capteur des zones de contrainte mécanique
Évitez de placer l’accéléromètre à proximité de :
- trous de vis
- entretoises
- clips de fixation
- blindages métalliques
- zones soumises à la pression du boîtier
Ces zones subissent souvent des efforts localisés lors de l’assemblage, ce qui peut décaler l’offset du capteur.
Éviter les zones flexibles du PCB
Ne placez pas le capteur près de :
- bords de carte
- parties étroites
- zones proches de découpes
- coins non soutenus
- parties en porte-à-faux
Ces zones se déforment et vibrent plus facilement pendant la manipulation ou le fonctionnement.
Rester à distance des sources de chaleur
Il vaut mieux éloigner l’accéléromètre de :
- processeurs
- PMIC
- circuits de charge
- batteries
- pistes à fort courant
- inductances de puissance
La chaleur locale peut augmenter la dérive et dégrader la stabilité de mesure.
Surveiller les sources de vibration
Des composants voisins peuvent injecter des vibrations indésirables dans la carte, notamment :
- haut-parleurs
- moteurs haptiques
- ventilateurs
- relais
- étages d’alimentation à découpage
En pratique, le meilleur emplacement est généralement une zone mécaniquement stable, thermiquement calme et éloignée des contraintes de fixation et des sources de vibration.
Règles de footprint pour les PCB avec accéléromètre
Une fois le placement défini, l’empreinte devient la priorité suivante. Pour les capteurs MEMS, elle influence directement la qualité de la soudure et la répartition des contraintes mécaniques.
Utiliser l’empreinte recommandée par le fabricant
Il faut toujours partir des recommandations officielles figurant dans la datasheet, notamment :
- l’empreinte de référence
- les dimensions des pads
- la définition du masque de soudure
- les recommandations de stencil
- les consignes d’assemblage
Il ne faut pas réutiliser une empreinte “qui ressemble” sans vérifier les données constructeur.
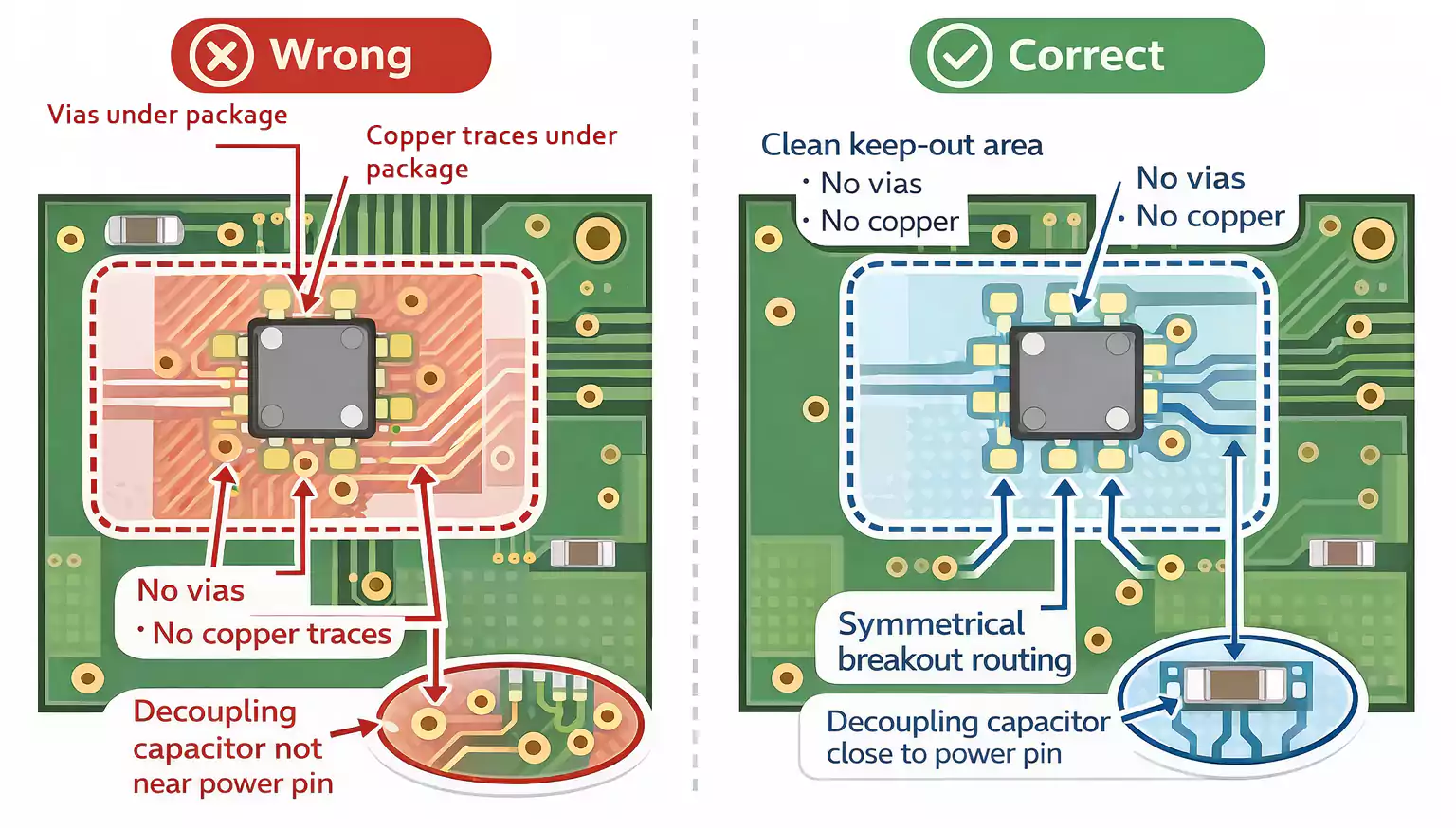
Ne pas placer de vias sous le boîtier
Évitez de mettre directement sous le capteur :
- des vias
- des pistes sur la couche supérieure
- des zones de cuivre denses
- des éléments mécaniques
Ces éléments peuvent nuire à la planéité, créer des différences locales de rigidité et augmenter les contraintes thermomécaniques.
Garder une zone propre autour du capteur
Un layout plus propre autour du boîtier améliore la constance d’assemblage et la stabilité à long terme. Cela facilite aussi l’inspection et réduit les contraintes parasites autour du capteur.
Conseils de routage : viser un layout propre et équilibré
Le routage d’un accéléromètre n’est généralement pas complexe du point de vue de la vitesse des signaux, mais il demande tout de même de la rigueur.
L’objectif n’est pas un routage sophistiqué. L’objectif est un routage court, propre et équilibré.
Alimentation
Placez le condensateur de découplage aussi près que possible de la broche d’alimentation du capteur.
Bonnes pratiques :
- garder une piste d’alimentation courte
- réduire la boucle de courant
- raccorder la masse proprement
- éviter les zones d’alimentation bruyantes
Gestion de la masse
Le capteur doit être connecté à une référence électrique stable. Cela implique :
- un chemin de retour de masse propre
- peu de boucles de courant parasites à proximité
- un éloignement des bruits liés aux alimentations à découpage
Routage I2C ou SPI
Pour les interfaces I2C ou SPI :
- garder les pistes courtes et directes
- éviter les détours inutiles
- éviter les zones fortement perturbées
- conserver une zone capteur facile à analyser et à déboguer
Utiliser une sortie de pads symétrique
La symétrie du routage compte davantage qu’on ne le pense. Un breakout asymétrique peut créer des contraintes inégales après refusion, alors qu’un routage plus équilibré réduit ce risque.
PCB 2 couches ou 4 couches ?
Les deux approches peuvent fonctionner selon le produit.
PCB 2 couches
- adapté aux conceptions simples, compactes et économiques
- acceptable si l’environnement électrique reste relativement calme
PCB 4 couches
- mieux adapté en présence de modules radio, processeurs ou alimentations à découpage
- facilite l’obtention d’un plan de masse plus propre
- souvent préférable pour la stabilité des systèmes mixtes
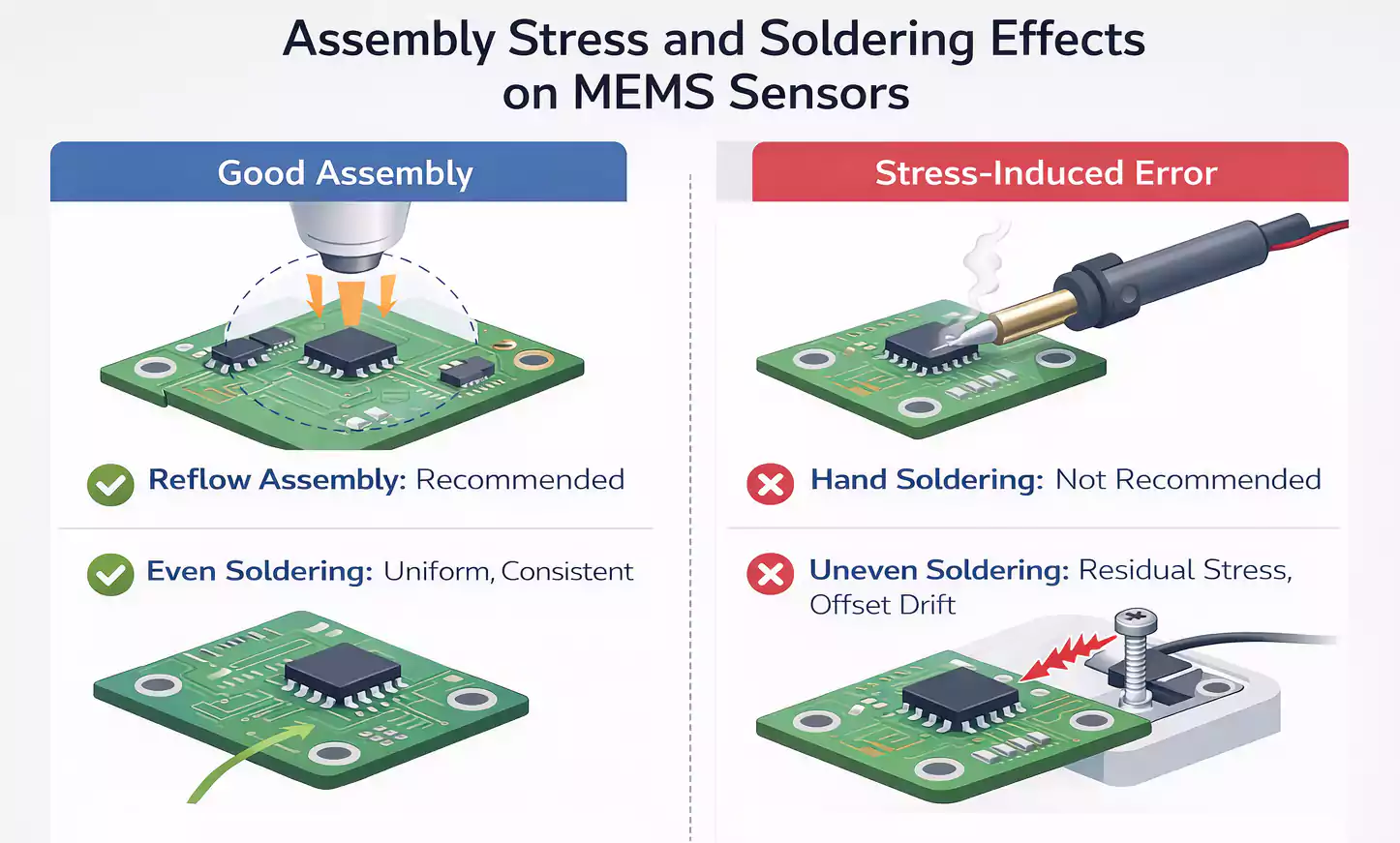
Soudure et assemblage : des facteurs qui influencent la précision
L’assemblage peut affecter directement les performances de l’accéléromètre. Même avec un bon layout, de mauvaises conditions de soudure peuvent réduire la précision et la répétabilité.
La refusion est généralement préférable
La plupart des accéléromètres MEMS sont conçus pour un assemblage automatique par reflow. La soudure manuelle peut introduire :
- un chauffage non uniforme
- des contraintes résiduelles
- des soudures moins homogènes
La régularité de la pâte à braser compte
Un dépôt irrégulier de pâte à braser peut empêcher le boîtier de se positionner correctement, ce qui peut entraîner :
- des variations d’offset
- des contraintes liées à l’assemblage
- des écarts entre différentes cartes
Laisser de l’espace autour du capteur
Il faut éviter d’entourer le capteur de composants lourds, de fixations ou de gros éléments mécaniques. Le layout doit rester cohérent dans le produit final, pas seulement dans le logiciel de CAO.
Prévoir un léger décalage après assemblage
De petites variations d’offset après refusion ou après montage dans le boîtier sont courantes. Le but n’est pas de les supprimer totalement, mais de les réduire par un bon layout et de les valider lors des essais.
Vérifications après assemblage et calibration de base
Une fois assemblée, la carte doit être évaluée comme un système complet de détection de mouvement, et non comme un simple PCB alimenté.
Contrôles de mise en route
Commencez par les vérifications de base :
- confirmer la stabilité de l’alimentation
- vérifier la communication avec le capteur
- lire l’identifiant du composant ou les registres d’état
- vérifier la cohérence du repérage des axes entre hardware et firmware
Contrôle statique de la sortie
Lorsque la carte est immobile, la sortie de l’accéléromètre doit correspondre à son orientation réelle. Cela permet de repérer :
- les gros problèmes d’offset
- les erreurs de repérage d’axes
- les défauts liés au montage
Calibration de base
Pour de nombreux produits grand public, une simple correction d’offset dans le firmware suffit. Pour des applications plus exigeantes, une calibration au niveau système peut être nécessaire afin de prendre en compte :
- les effets du boîtier
- le mode de fixation du PCB
- le comportement en température
- l’alignement global du système
La calibration doit idéalement être réalisée sur le produit assemblé, et non uniquement sur une carte nue en prototype.
Erreurs fréquentes en conception de PCB Accelerometer
Parmi les erreurs les plus courantes :
- placer le capteur près des trous de vis ou des entretoises
- le positionner à côté de composants chauds
- router des vias ou des pistes sous le boîtier
- négliger la flexion de la carte près des bords ou des découpes
- utiliser un breakout asymétrique
- souder manuellement un boîtier prévu pour le reflow
- négliger la validation après assemblage
Ces erreurs sont trompeuses, car la carte peut tout de même s’allumer et communiquer normalement. Les vrais problèmes apparaissent souvent plus tard, sous forme de dérive, de bruit ou d’instabilité des mesures.
Checklist avant l’envoi en fabrication
Avant de lancer la fabrication, il est utile de vérifier les points suivants :
- le capteur correspond bien à l’application visée
- son placement l’éloigne des vis, blindages et sources de chaleur
- la zone choisie sur le PCB est mécaniquement stable
- aucun via ni cuivre inutile n’est placé sous le boîtier
- le breakout routing reste suffisamment symétrique
- le découplage est proche des broches d’alimentation
- le capteur dispose d’une référence électrique propre
- le procédé d’assemblage est adapté au boîtier
- les contrôles d’axes et d’offset après assemblage sont prévus
Une checklist simple comme celle-ci peut éviter de longues phases de débogage par la suite.
Conclusion
Un PCB Accelerometer fiable ne dépend pas uniquement de la connectivité électrique. Les décisions de layout influencent directement la capacité du capteur à mesurer le vrai mouvement, et non les effets parasites dus aux contraintes mécaniques, à la chaleur, aux vibrations ou à l’assemblage.
En pratique, de bonnes performances reposent sur quelques bases essentielles :
- un placement pertinent du capteur
- une empreinte propre
- un routage équilibré
- un assemblage maîtrisé
- une validation sérieuse après fabrication
Lorsque ces fondamentaux sont bien traités, la carte est plus facile à calibrer, plus stable en fonctionnement et plus cohérente dans le temps.
Chez FastTurnPCB, nous savons que les cartes à capteurs de précision demandent plus qu’un simple respect des règles classiques de layout. Pour les projets d’accéléromètres et d’autres applications de détection de mouvement, un design fabricable et une bonne maîtrise des contraintes mécaniques font toute la différence.