Beim Design einer PCB mit Beschleunigungssensor geht es um weit mehr als nur darum, den Sensor mit einem Mikrocontroller zu verbinden. In realen Anwendungen hat das PCB-Layout direkten Einfluss auf Messgenauigkeit, Stabilität und Wiederholbarkeit.
Im Gegensatz zu gewöhnlichen digitalen ICs reagieren MEMS-Beschleunigungssensoren nicht nur auf Bewegung. Sie sind auch empfindlich gegenüber PCB-Verformung, thermomechanischer Belastung, nahen Wärmequellen, Vibrationen benachbarter Bauteile und montagebedingten Einflüssen.
Deshalb muss das Design eines Beschleunigungssensor-PCBs immer aus zwei Blickwinkeln betrachtet werden: elektrisch und mechanisch. Sensorplatzierung, Footprint-Design, symmetrisches Routing und die Qualität der Montage spielen eine entscheidende Rolle für die Gesamtperformance.
Warum sich das Design eines PCB-Beschleunigungssensors unterscheidet
Das Design eines PCB-Beschleunigungssensors ist nicht mit dem Routing eines Standard-Digital-ICs vergleichbar. Da der Sensor physikalische Bewegung misst, reagiert er auch empfindlich auf den mechanischen Zustand der Leiterplatte selbst.
PCB-Biegung, lokale Montagekräfte und benachbarte Wärmequellen können das Sensorsignal beeinflussen. Im ungünstigen Fall interpretiert der Beschleunigungssensor diese Effekte als Offset-Drift, zusätzliches Rauschen oder sogar als falsche Bewegung.
Genau deshalb ist das PCB-Layout hier so wichtig. Ein Logikbaustein kann kleinere Layout-Schwächen oft tolerieren, ohne dass sich dies deutlich zeigt. Ein Beschleunigungssensor in der Regel nicht.
Typische PCB-bedingte Probleme sind:
- instabiler Offset
- fehlerhafte Bewegungssignale
- höheres Rauschen
- Temperaturdrift
- Unterschiede zwischen Prototypen und Serienfertigung
Der wichtigste Punkt ist einfach:
Bei einem Beschleunigungssensor ist das PCB selbst Teil des Messsystems.
Den richtigen Beschleunigungssensor vor dem Layout auswählen
Ein gutes Layout beginnt mit dem richtigen Sensor. Welche Lösung am besten passt, hängt von der Anwendung, der geforderten Leistung und den Randbedingungen des Systems ab.
Typische Einsatzbereiche
- Wearables: niedriger Stromverbrauch und kompakte Bauform
- Robotik: stabiles Signal und gute dynamische Reaktion
- Neigungs- und Lagesensorik: rauscharme Messung bei geringer Bewegung
- Industrielles Monitoring: größerer Messbereich und hohe mechanische Robustheit
- Consumer Electronics: kleines Package und einfache MCU-Anbindung
Wichtige Kenndaten vor dem Layout-Freeze
| Parameter | Warum er wichtig ist |
|---|---|
| Messbereich | Bestimmt, wie viel Bewegung oder Stoß erfasst werden kann |
| Rauschdichte | Beeinflusst die Genauigkeit bei kleinen Signalen |
| Bandbreite / ODR | Muss zum tatsächlichen Bewegungsprofil passen |
| Schnittstelle | I2C ist einfach, SPI kann robuster und schneller sein |
| Gehäusegröße | Kleine Packages sparen Platz, sind aber oft layoutkritischer |
Wenn das Design nur lineare Bewegung, Neigung oder Wake-up per Bewegung erfassen soll, reicht meist ein einzelner Beschleunigungssensor aus. Werden zusätzlich Drehbewegungen oder Sensorfusion benötigt, ist eine IMU oft die bessere Wahl.
Die beste Platzierung eines Beschleunigungssensors auf dem PCB
Die Platzierung ist meist die wichtigste Entscheidung im Design eines PCB-Beschleunigungssensors. Ein gut positionierter Sensor verbessert Stabilität und Genauigkeit schon, bevor das eigentliche Routing beginnt.
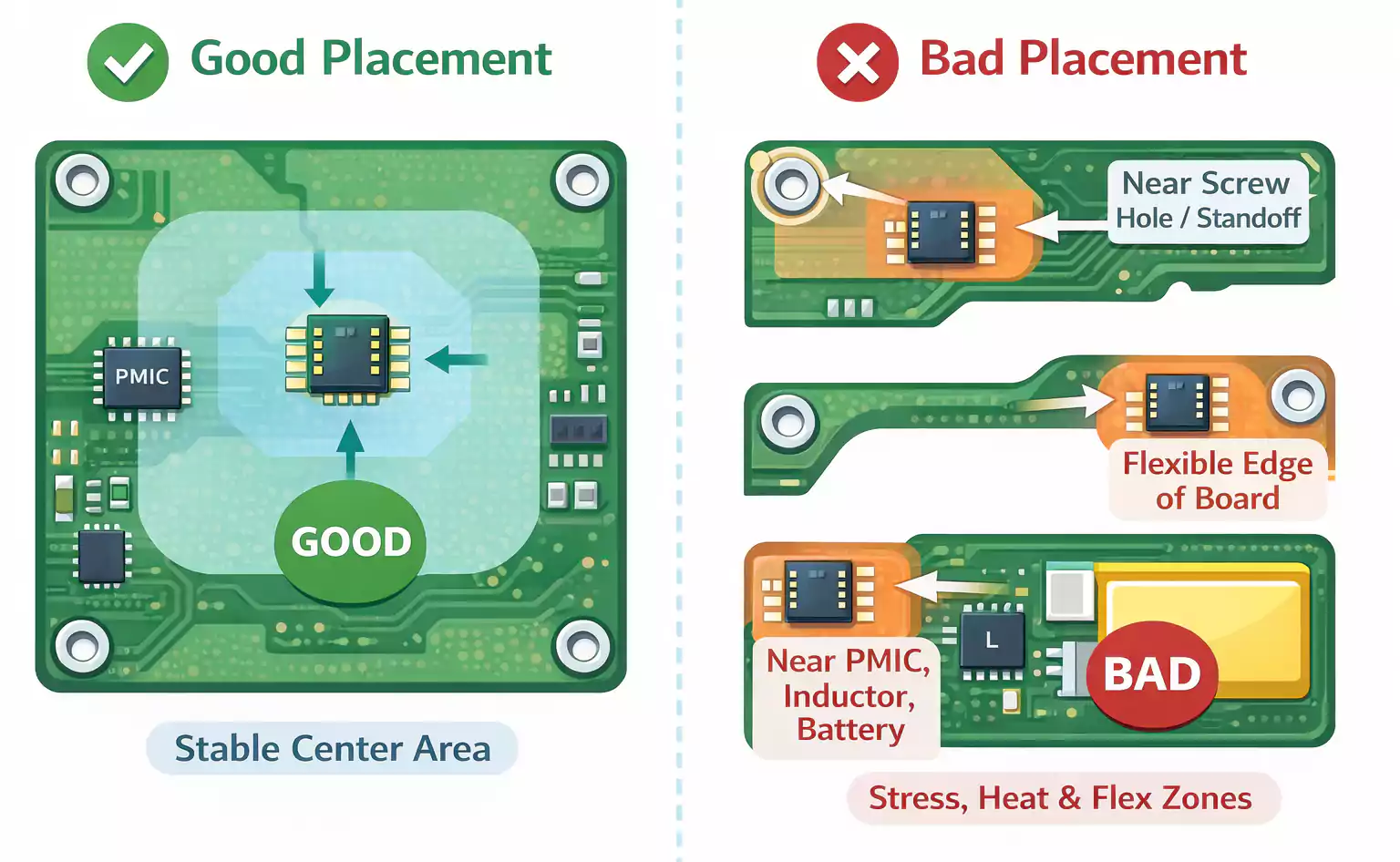
Sensor von mechanischen Belastungszonen fernhalten
Der Beschleunigungssensor sollte nicht in der Nähe folgender Bereiche platziert werden:
- Schraublöcher
- Abstandshalter
- Schnapp- oder Clip-Bereiche
- Abschirmungen
- Gehäusestellen mit Druckbelastung
In diesen Bereichen treten bei der Montage häufig lokale Kräfte auf, die den Sensoroffset verschieben können.
Flexible PCB-Bereiche vermeiden
Ungünstig sind vor allem:
- Leiterplattenränder
- schmale Ausleger
- Bereiche nahe Aussparungen
- ungestützte Ecken
- freitragende PCB-Abschnitte
Solche Zonen neigen eher zu Biegung und Vibration im Betrieb oder bei der Handhabung.
Abstand zu Wärmequellen halten
Der Sensor sollte möglichst weit entfernt sein von:
- Prozessoren
- PMICs
- Ladeelektronik
- Batterien
- stromstarken Leiterbahnen
- Leistungsinduktivitäten
Lokale Erwärmung kann Drift verstärken und die Messstabilität verschlechtern.
Vibrationsquellen in der Nähe berücksichtigen
Benachbarte Bauteile können unerwünschte mechanische Störungen in die Leiterplatte einbringen, zum Beispiel:
- Lautsprecher
- Haptikmotoren
- Lüfter
- Relais
- Schaltreglerstufen
Die beste Sensorposition liegt in der Regel in einem Bereich, der mechanisch stabil, thermisch ruhig und möglichst weit von Montagekräften und Vibrationsquellen entfernt ist.
Footprint-Regeln für PCB-Beschleunigungssensoren
Sobald die Platzierung feststeht, wird der Footprint zur nächsten Priorität. Bei MEMS-Sensoren beeinflusst der Footprint nicht nur die Lötqualität, sondern auch die mechanische Belastung des Bauteils.
Mit dem empfohlenen Land Pattern des Herstellers arbeiten
Die Grundlage sollte immer die offizielle Package-Empfehlung des Sensorherstellers sein, einschließlich:
- Land Pattern
- Pad-Abmessungen
- Solder-Mask-Definition
- Stencil-Empfehlungen
- Montagehinweise
Ein scheinbar ähnlicher Footprint sollte nicht ohne Datenblattprüfung wiederverwendet werden.
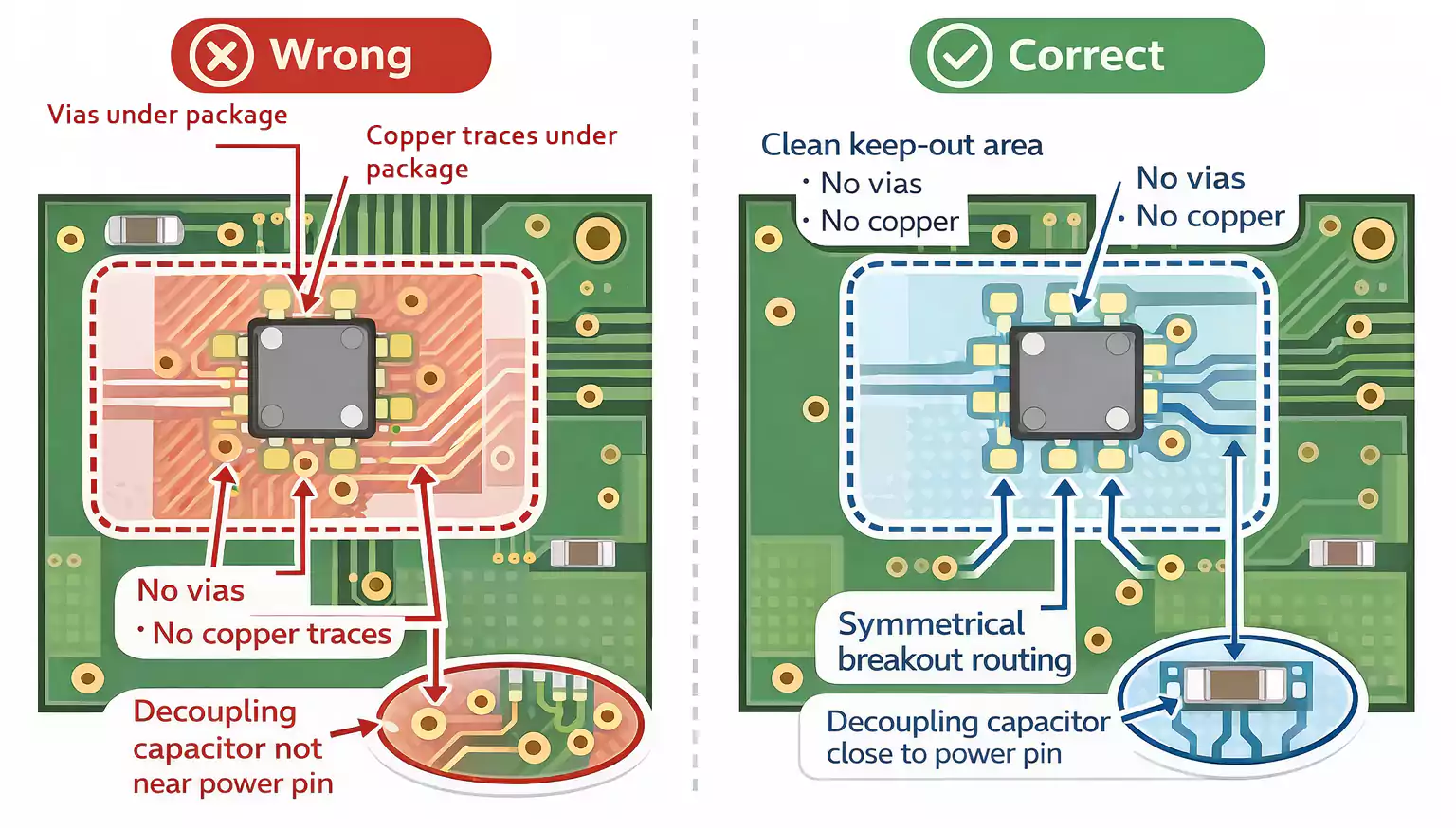
Keine Vias unter dem Package platzieren
Direkt unter dem Sensor sollten folgende Strukturen vermieden werden:
- Vias
- Leiterbahnen auf der Oberseite
- dichte Kupferflächen
- mechanische Strukturen
Diese können die Planarität verschlechtern, lokale Steifigkeitsunterschiede erzeugen und thermomechanische Spannungen erhöhen.
Den Sensorbereich sauber halten
Ein aufgeräumter Bereich rund um den Sensor verbessert die Reproduzierbarkeit in der Montage und die Langzeitstabilität. Außerdem wird die Inspektion einfacher und unerwünschte Belastung rund um den Sensor reduziert.
Routing-Tipps: Das Layout sauber und ausgewogen halten
Elektrisch betrachtet ist das Routing für einen Beschleunigungssensor meist nicht besonders anspruchsvoll. Trotzdem ist ein sauberes und kontrolliertes Routing wichtig.
Das Ziel ist kein aufwendiges Spezialrouting, sondern ein kurzes, sauberes und ausgewogenes Layout.
Versorgung routing
Der Abblockkondensator sollte so nah wie möglich an der Versorgungspin des Sensors platziert werden.
Bewährte Vorgehensweisen:
- Versorgungspfad kurz halten
- Schleifenfläche minimieren
- Masse sauber anbinden
- keine Führung durch stark gestörte Versorgungsbereiche
Massekonzept
Der Sensor braucht eine stabile elektrische Referenz. Das bedeutet:
- sauberer Rückstrompfad
- keine störenden Stromschleifen in Sensornähe
- Abstand zu Bereichen mit starkem Schaltreglerrauschen
I2C- oder SPI-Routing
Für I2C oder SPI gilt:
- Leitungen kurz und direkt führen
- unnötige Umwege vermeiden
- keine Führung durch stark gestörte Zonen
- den Sensorbereich gut nachvollziehbar und debug-freundlich halten
Symmetrisches Escape-Routing verwenden
Die Routing-Symmetrie ist wichtiger, als viele erwarten. Ein asymmetrisches Breakout kann nach dem Reflow zu ungleichmäßiger Belastung führen. Ein ausgewogeneres Escape-Routing hilft, dieses Risiko zu reduzieren.
2-Lagen- oder 4-Lagen-PCB?
Beides kann funktionieren, abhängig vom Produkt.
2-Lagen-PCB
- gut für einfache, kompakte und kostensensitive Designs
- ausreichend, wenn die elektrische Umgebung relativ ruhig ist
4-Lagen-PCB
- besser geeignet bei Funkmodulen, Prozessoren oder Schaltreglern
- erleichtert eine saubere Masseführung
- oft die bessere Wahl für Mixed-Signal-Stabilität
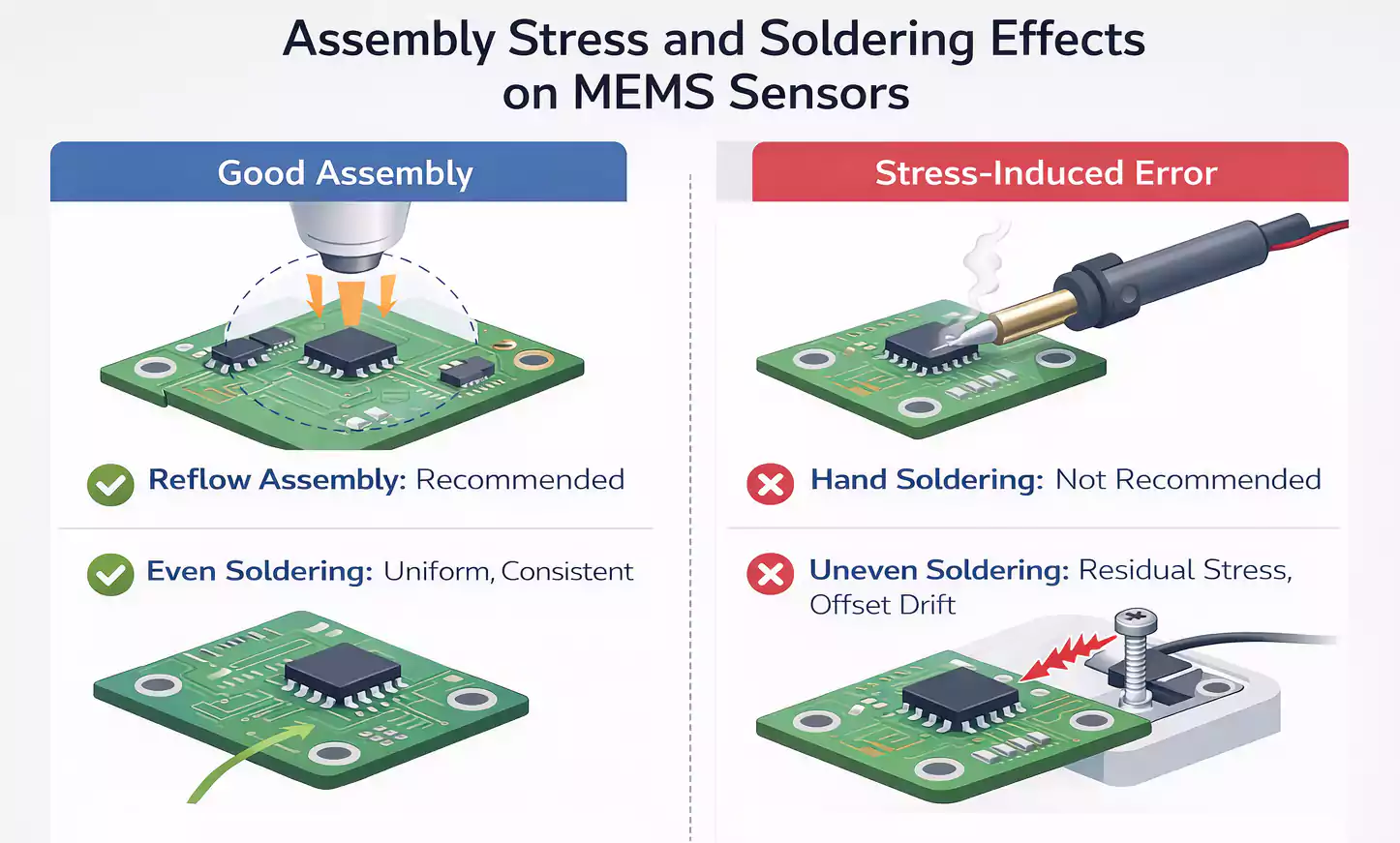
Löten und Montage: Einflussfaktoren auf die Genauigkeit
Auch die Montage selbst kann die Leistung des Beschleunigungssensors deutlich beeinflussen. Selbst bei gutem Layout führen schlechte Lötbedingungen schnell zu geringerer Genauigkeit und schlechterer Wiederholbarkeit.
Reflow ist in der Regel die bessere Wahl
Die meisten MEMS-Beschleunigungssensoren sind für automatisierte Reflow-Montage ausgelegt. Handlöten kann verursachen:
- ungleichmäßige Erwärmung
- Restspannungen
- ungleichmäßige Lötstellenqualität
Konsistenz der Lotpaste ist wichtig
Wird die Lotpaste ungleichmäßig aufgetragen, kann das Package schief oder ungleichmäßig sitzen. Mögliche Folgen:
- Offset-Abweichungen
- montagebedingte Spannungen
- Unterschiede von Board zu Board
Genügend Freiraum um den Sensor lassen
Der Sensor sollte nicht von schweren Bauteilen, Befestigungselementen oder großen mechanischen Strukturen eingeengt werden. Das Layout muss im Endprodukt mechanisch sinnvoll sein, nicht nur im CAD.
Leichte Verschiebungen nach der Montage einplanen
Kleine Offset-Änderungen nach dem Reflow oder nach der Endmontage im Gehäuse sind normal. Ziel ist nicht, jeden Effekt vollständig auszuschließen, sondern ihn durch gutes Layout zu minimieren und im Test zu verifizieren.
Prüfungen nach der Montage und grundlegende Kalibrierung
Nach der Bestückung sollte das Board als komplettes Bewegungserfassungssystem geprüft werden, nicht nur als elektrisch funktionsfähiges PCB.
Erste Inbetriebnahme
Zunächst sollten die Grundlagen überprüft werden:
- stabile Versorgung sicherstellen
- Kommunikation mit dem Sensor prüfen
- Device-ID oder Statusregister auslesen
- Achsenzuordnung in Hardware und Firmware verifizieren
Plausibilitätsprüfung im Ruhezustand
Wenn die Leiterplatte still liegt, sollte das Ausgangssignal des Sensors zur tatsächlichen Orientierung passen. Damit lassen sich erkennen:
- größere Offset-Probleme
- Achsenzuordnungsfehler
- montagebedingte Einflüsse
Grundlegende Kalibrierung
Für viele Consumer-Produkte reicht eine einfache Offset-Korrektur in der Firmware. Bei anspruchsvolleren Anwendungen kann eine weitergehende Systemkalibrierung notwendig sein, um folgende Effekte zu berücksichtigen:
- Einflüsse des Gehäuses
- Art der PCB-Befestigung
- Temperaturverhalten
- Gesamtausrichtung des Systems
Die Kalibrierung sollte möglichst am fertig montierten Produkt erfolgen und nicht nur an einem nackten Prototypen-PCB.
Häufige Fehler beim Design eines PCB-Beschleunigungssensors
Zu den häufigsten Fehlern gehören:
- Platzierung des Sensors nahe Schraublöchern oder Abstandshaltern
- Positionierung neben warmen Bauteilen
- Vias oder Leiterbahnen unter dem Package
- Vernachlässigung von PCB-Biegung an Kanten oder Aussparungen
- asymmetrisches Breakout-Routing
- Handlöten eines für Reflow ausgelegten Packages
- fehlende Prüfung nach der Montage
Diese Fehler sind besonders tückisch, weil das Board trotzdem scheinbar normal startet und kommuniziert. Die eigentlichen Probleme zeigen sich oft erst später als Drift, Rauschen oder instabile Messwerte.
Checkliste vor der Freigabe zur Fertigung
Vor dem Start der Fertigung sollten folgende Punkte geprüft werden:
- Der gewählte Sensor passt zur tatsächlichen Anwendung
- Die Platzierung hält Abstand zu Schrauben, Abschirmungen und Wärmequellen
- Der gewählte PCB-Bereich ist mechanisch stabil
- Unter dem Package befinden sich keine unnötigen Vias oder Kupferstrukturen
- Das Breakout-Routing ist ausreichend symmetrisch
- Die Abblockung sitzt nahe an den Versorgungspins
- Der Sensor hat eine saubere elektrische Referenz
- Das Montageverfahren passt zum Package
- Achsen- und Zero-g-Prüfung nach der Bestückung sind eingeplant
Eine einfache Checkliste wie diese kann später viel Debugging-Aufwand sparen.
Fazit
Ein zuverlässiger PCB-Beschleunigungssensor hängt von mehr ab als nur von korrekter elektrischer Verbindung. Layout-Entscheidungen bestimmen direkt, wie gut der Sensor echte Bewegung erfasst, statt auf mechanische Spannung, Wärme, Vibration oder Montageeinflüsse zu reagieren.
In der Praxis basieren gute Ergebnisse auf einigen grundlegenden Faktoren:
- richtige Sensorplatzierung
- sauberer Footprint
- ausgewogenes Routing
- kontrollierte Montage
- praxisnahe Verifikation nach der Fertigung
Wenn diese Grundlagen stimmen, lässt sich das Board leichter kalibrieren, arbeitet stabiler im Einsatz und liefert über die Zeit konsistentere Ergebnisse.
Bei FastTurnPCB wissen wir, dass Präzisions-Sensorboards mehr erfordern als Standardregeln für das PCB-Layout. Gerade bei Beschleunigungssensoren und anderen Motion-Sensing-Anwendungen sind fertigungsgerechtes Layout und ein gutes Verständnis der mechanischen Einflüsse entscheidend für zuverlässige Ergebnisse.